Coal dump temperature measurement robot
A technology of robots and crawling robots, which is applied in the field of temperature measurement of coal piles, can solve problems such as inconvenient measurement of temperature defects, and achieve the effect of simple and compact overall structure, reducing resistance and ensuring normal operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
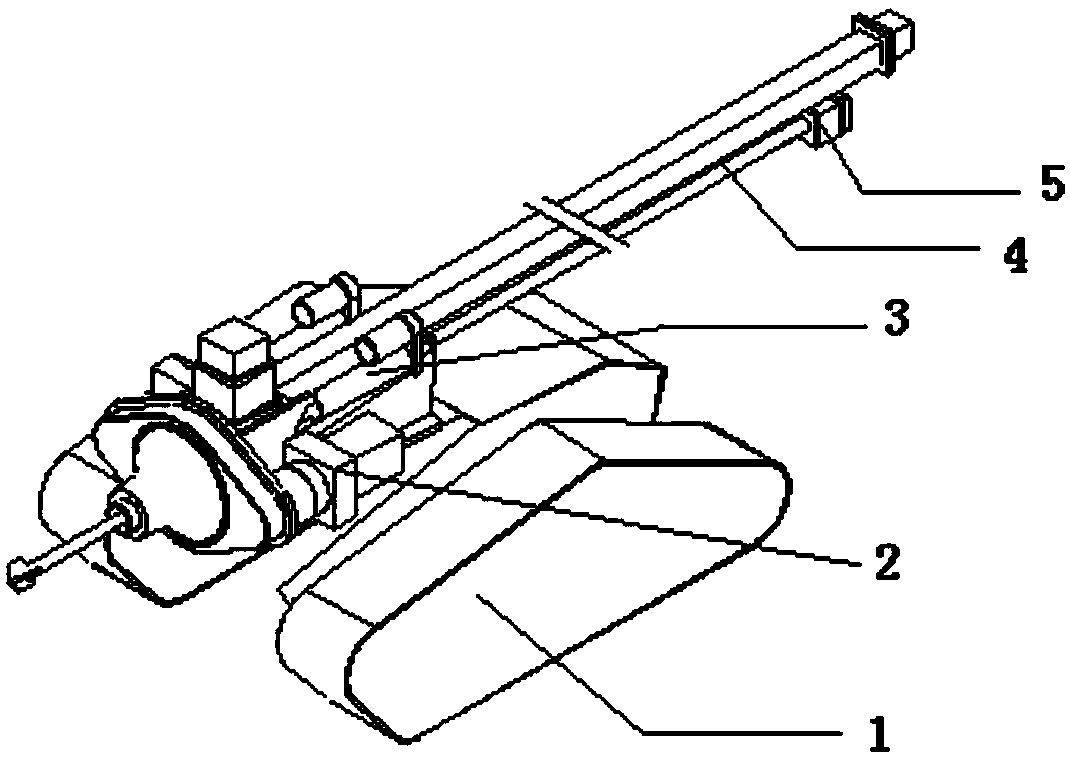
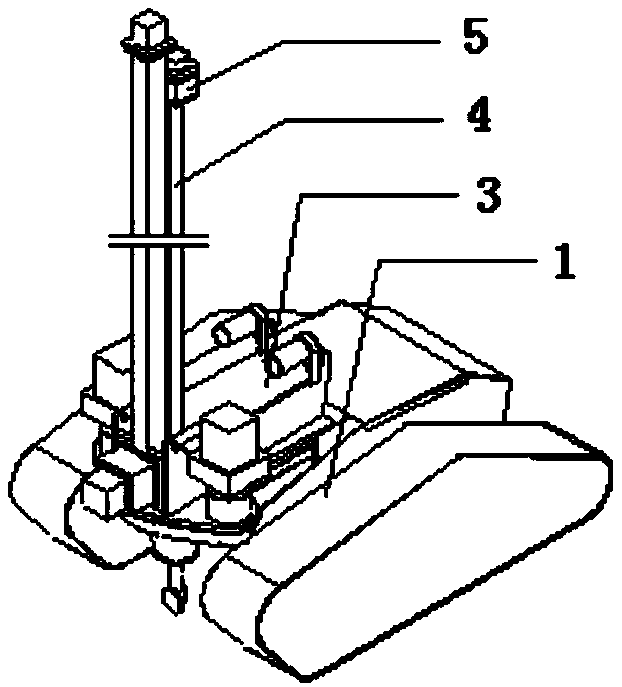
[0066] Such as Figure 1-5 Shown is a specific implementation of a coal pile temperature measuring robot, including a crawling robot 1. The crawling robot 1 has crawlers and can crawl to any position on the coal pile; the crawling robot 1 is provided with a rotation that can rotate around an axis Bracket 31, a pitch driving device drives the rotating bracket 31 to rotate. In this embodiment, the pitch driving device includes a number of retractable electric push rods, one end of which is fixedly connected to the crawling robot 1, and The other end is fixedly connected to the rotating bracket 31. The rotating bracket 31 and the pitch driving device constitute the pitch mechanism 3. The screw 4 mounted on the rotating bracket 31 can be in a vertical state under the driving of the pitch mechanism 3. And the horizontal state; the rotating bracket 31 is installed with a rotating drive device 2 that includes a first drive motor 21, a first gear 22 connected to the output shaft of the...
Embodiment 2
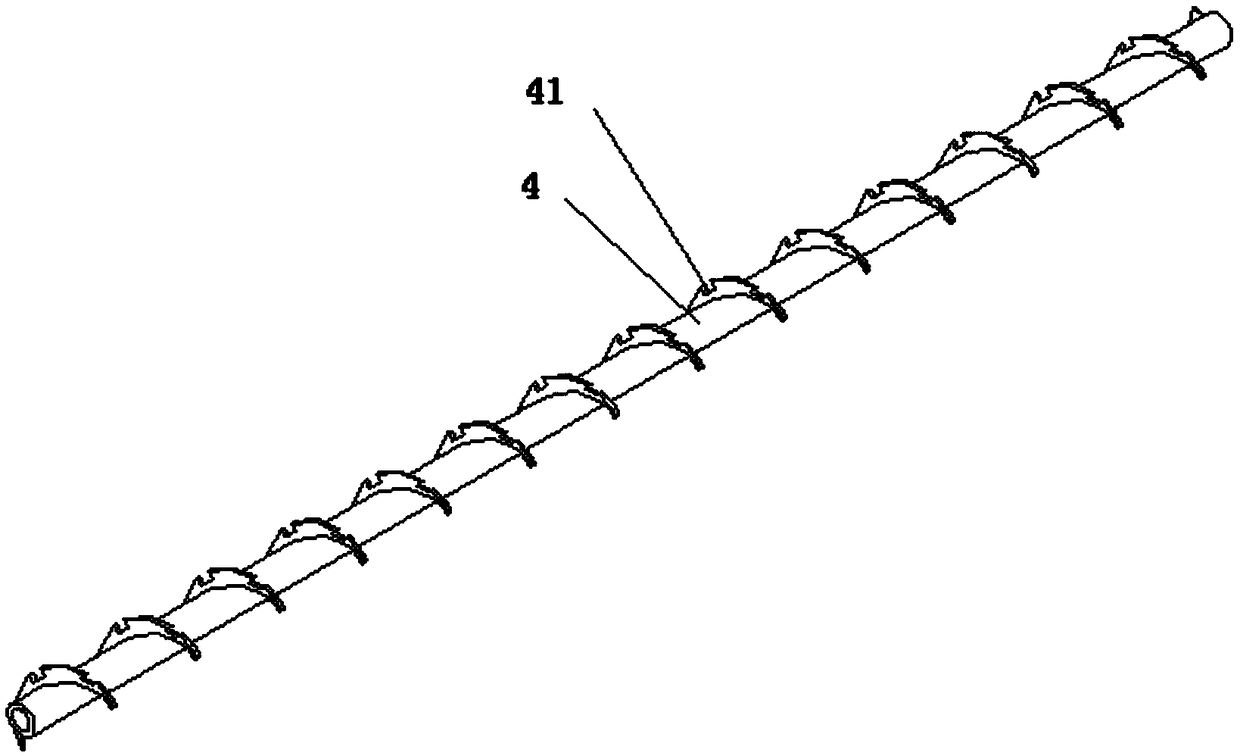
[0072] The difference between this embodiment and the foregoing embodiment is that, as shown in the figure, the transmission structure includes a first gear 22 connected to the output shaft of the first drive motor 21, meshingly connected with the first gear 22, and The screw 4 connecting piece is coaxially fixedly connected to the second gear 26, the screw 4 connecting piece and the rotating bracket 31 are connected by a number of deep groove ball bearings 27, the middle section of the screw 4 connecting piece has an extension At the exit part, the second gear 26 is bolted to the extension part. When the screw 4 rotating device is working, the first drive motor 21 works to drive the first gear 22 to rotate, the second gear 26 meshes with the first gear 22 to rotate, and the screw 4 connecting piece rotates with the second gear 26 so as to be installed in The screw 4 in the screw 4 connection piece rotates.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com