A Parallel Compliant Wheel-Foot Device for Wheel-footed Robots
A robot and parallel technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of affecting control accuracy and stability, insufficient bearing capacity, low stiffness of foot joints, etc. Control effect, strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032]The present invention will be further described in further detail below with reference to the accompanying drawings.
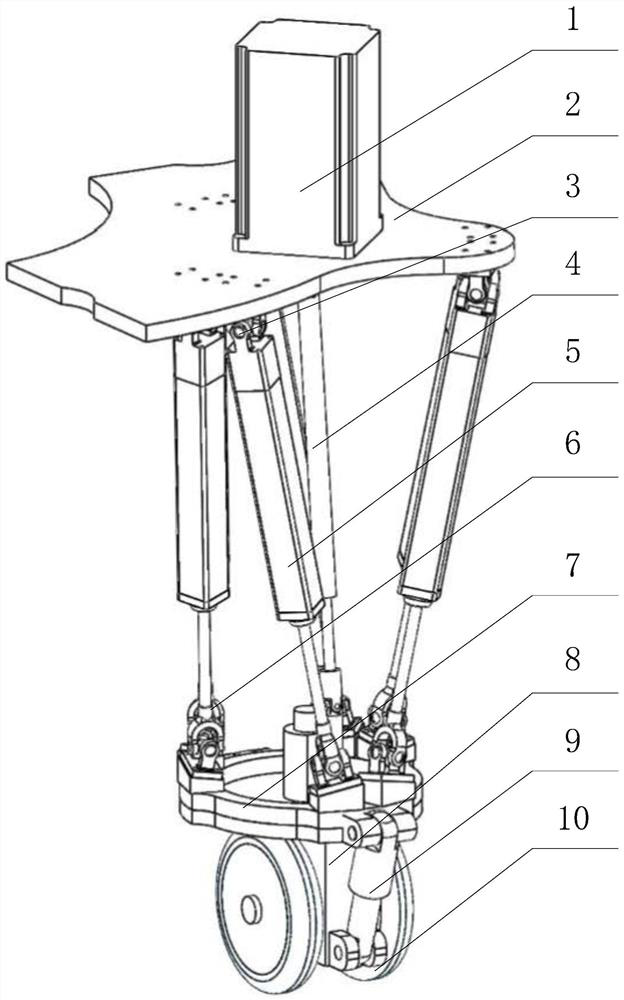
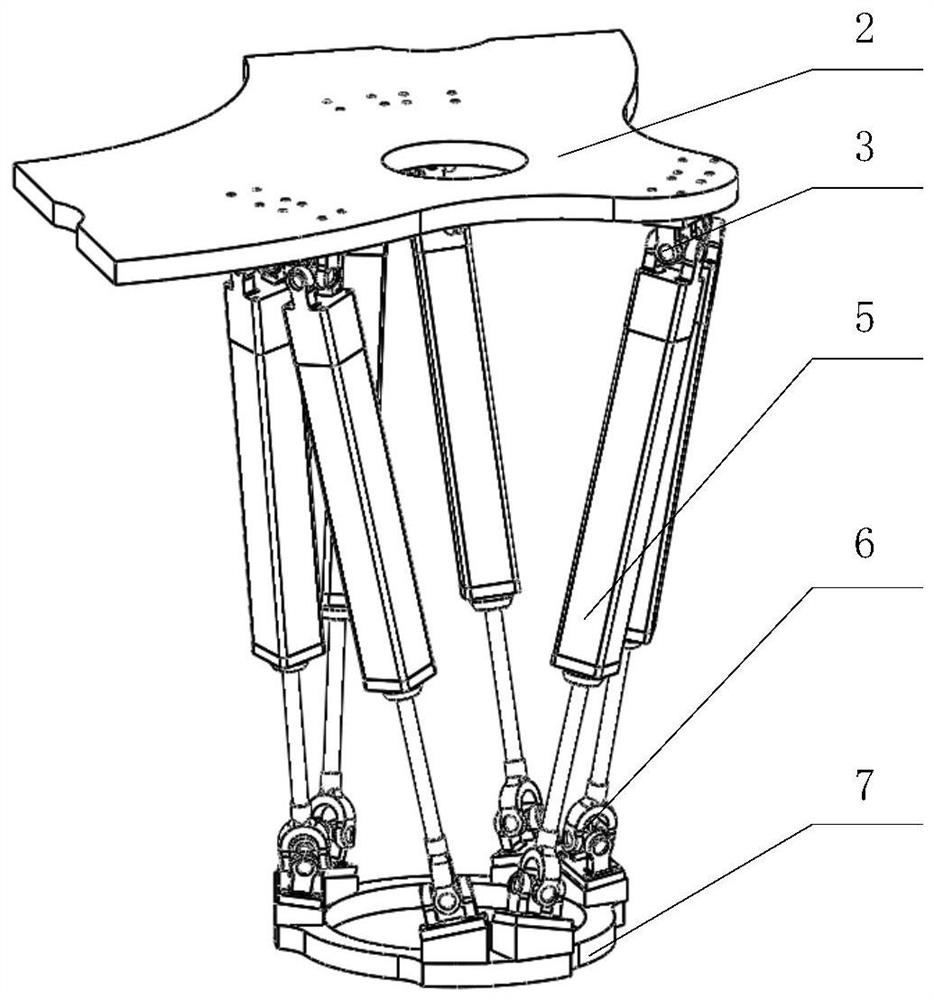
[0033]A parallel comparative pulley device for a wheelfall robot, which consists of an inverted parallel six degree of freedom motion structure and a foot-driven wheel assembly. The six-degree-of-freedom motion structure is bracketing around the foot-driven wheel assembly to make full use of space, narrowing the volume of the entire round foot device, suitable for small volume applications. Moreover, through a single free-degree spring-damping suspension design, it can be added to the foot mechanism to adjust the adjustable stiffness and damping, achieving the adaptability of the foot to the external force, is a foot-stuffed touch, and the wheel drive wheel is suspended. Important foundation.
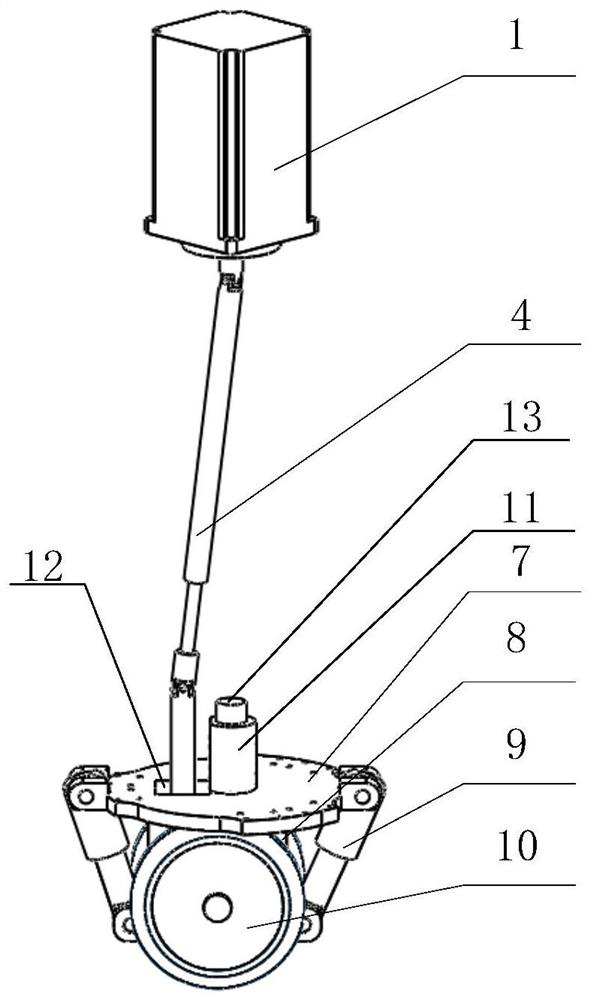
[0034]Such asimage 3 As shown, the foot-driven wheel assembly includes a drive motor 1, a transmission link 4, a reduction machine 8, a spring damper 9, and a tire 10. The dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com