

Farming robot
A robot and robot body technology, applied in the field of farming robots, can solve the problems of low farmland efficiency, high motor power consumption, and high manufacturing costs, and achieve the effects of improving space utilization, prolonging service life, and low manufacturing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
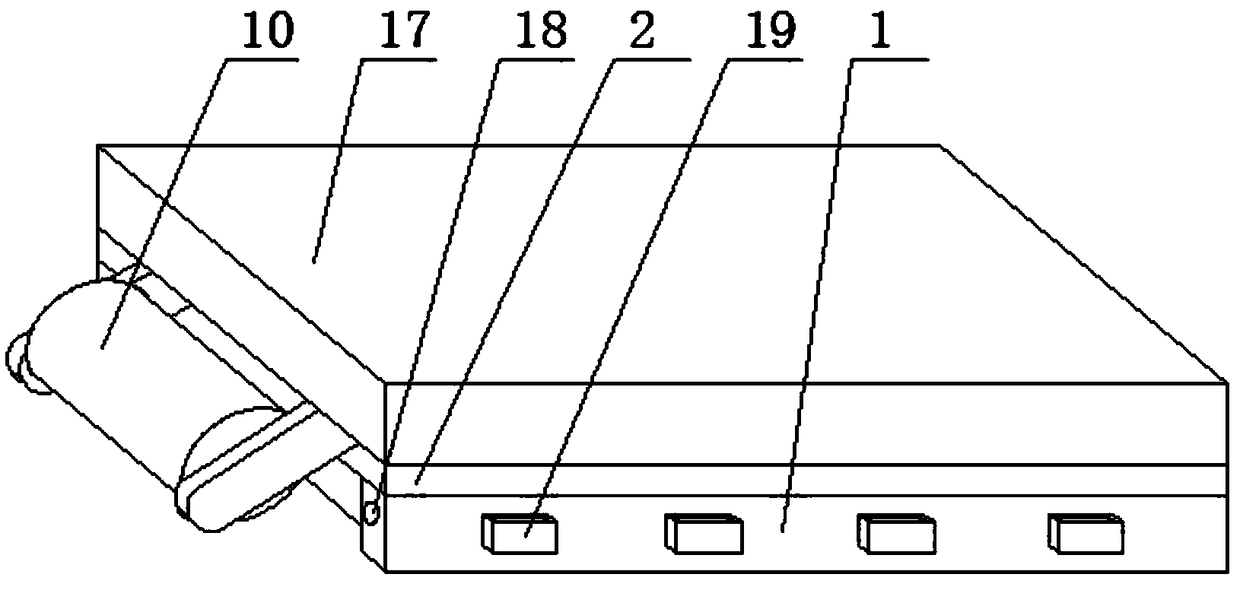
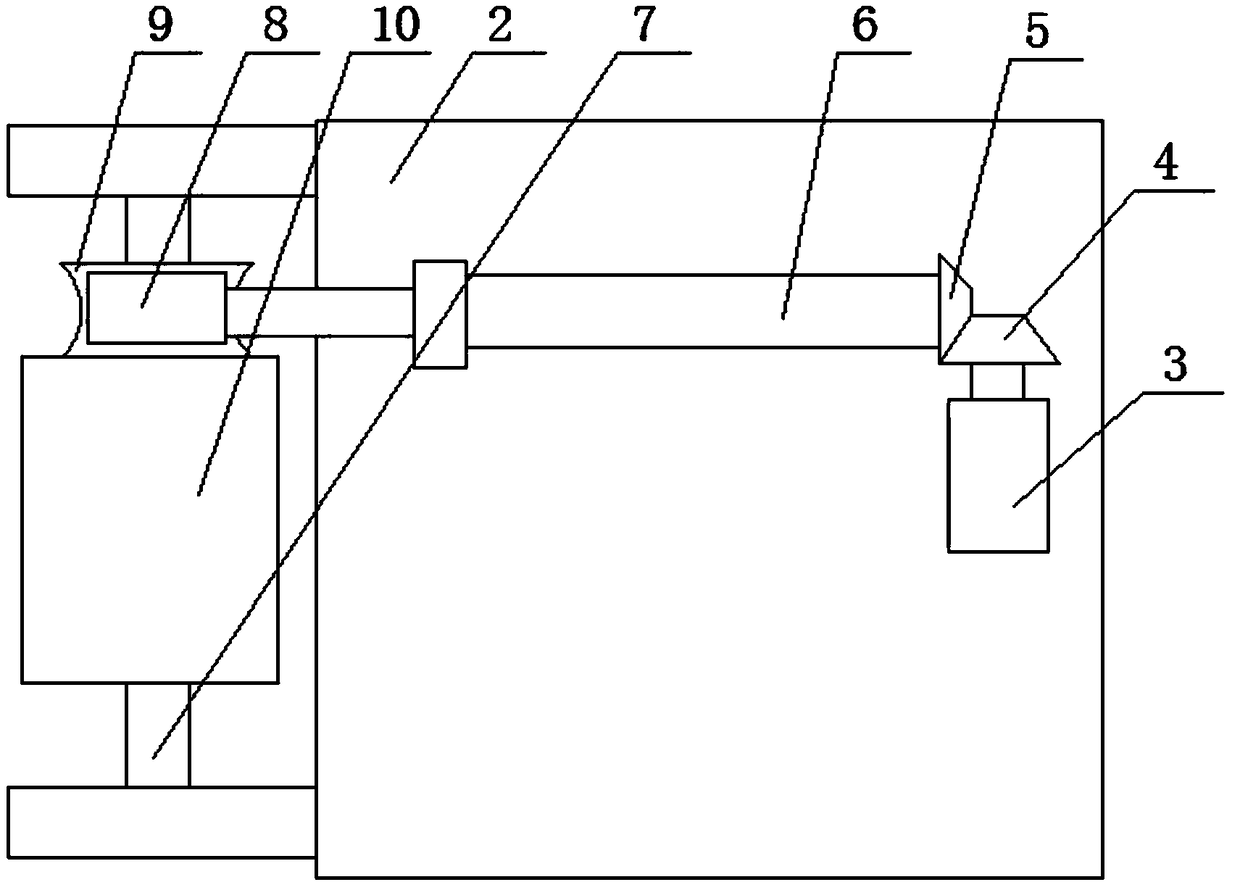
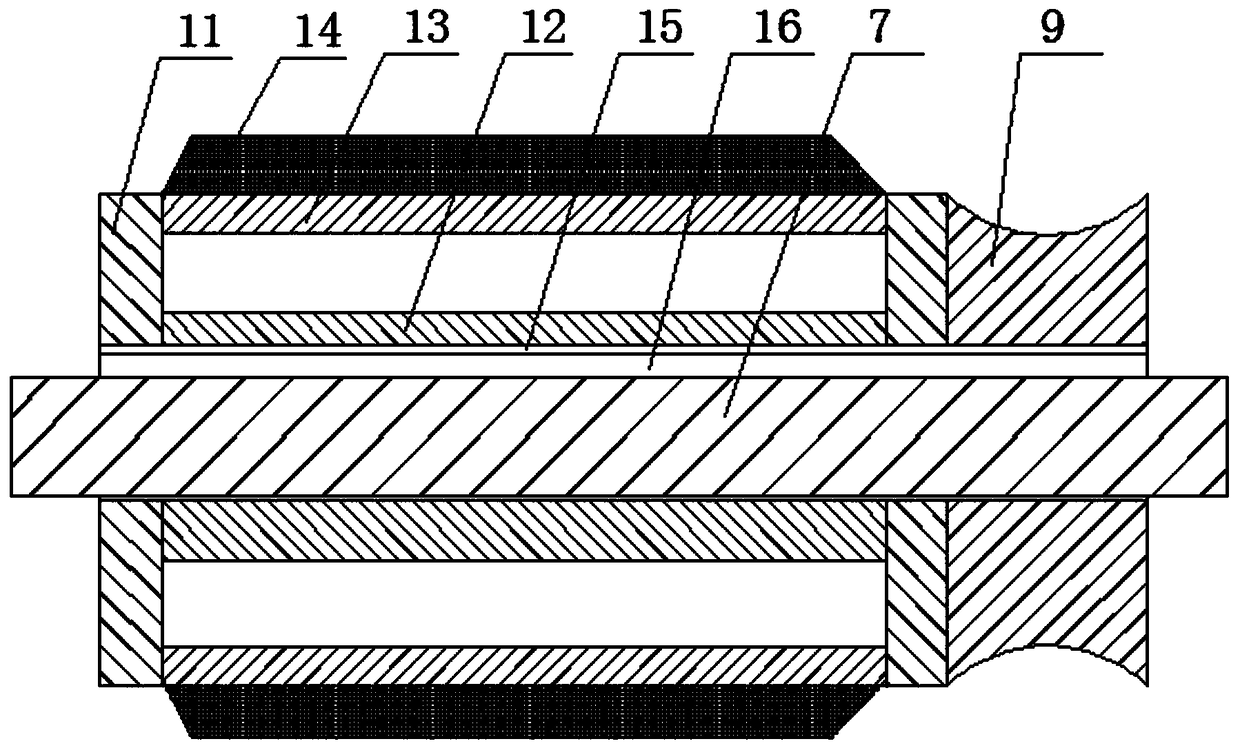
[0028] Such as Figure 1 to Figure 3 As shown, a farming robot includes a robot body 1, a load plate 2, a servo motor 3, a bevel gear I4, a bevel gear II5, a gear shaft 6, a tiller shaft 7, a worm 8, a turbine 9 and a rotary tiller module 10; The bottom end of the carrying plate 2 is fixedly connected to the top of the robot body 1; the bottom end of the servo motor 3 is fixedly connected to the top of the carrying plate 2, and the gear shaft 6 is rotatably connected to the end of the carrying plate 2 through a bearing. The top; the bevel gear I4 is fixedly connected to the shaft of the servo motor 3 through a key, the bevel gear II5 is connected to one end of the gear shaft 6 through a key, and the other end of the gear shaft 6 is connected to the worm 8 through a coupling, The bevel gear I4 is meshed with the bevel gear II5, and the worm gear 9 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More