

Software robot actuator with rigidity independently controllable
An actuator and robot technology, applied in the direction of program control manipulators, manipulators, conveyor objects, etc., can solve problems such as damage to the flexibility of soft robots, small changeable range of stiffness, etc., to balance flexibility and load-bearing capacity, controllability Strong and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
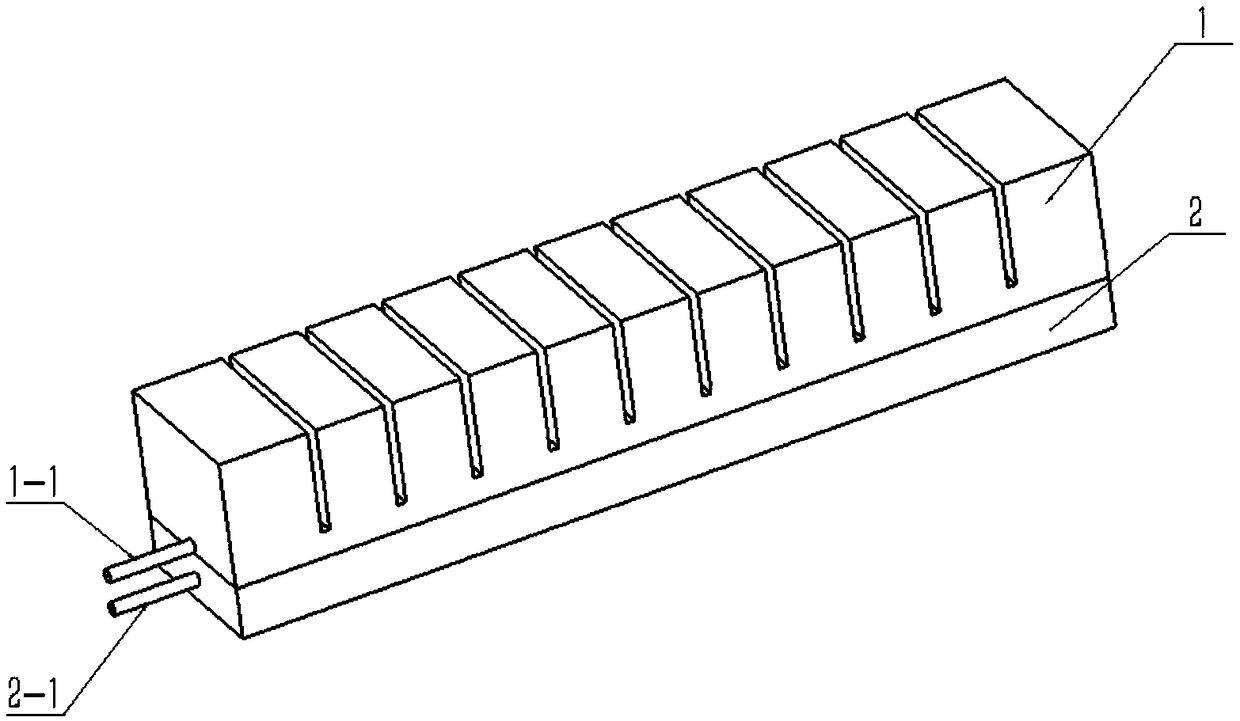
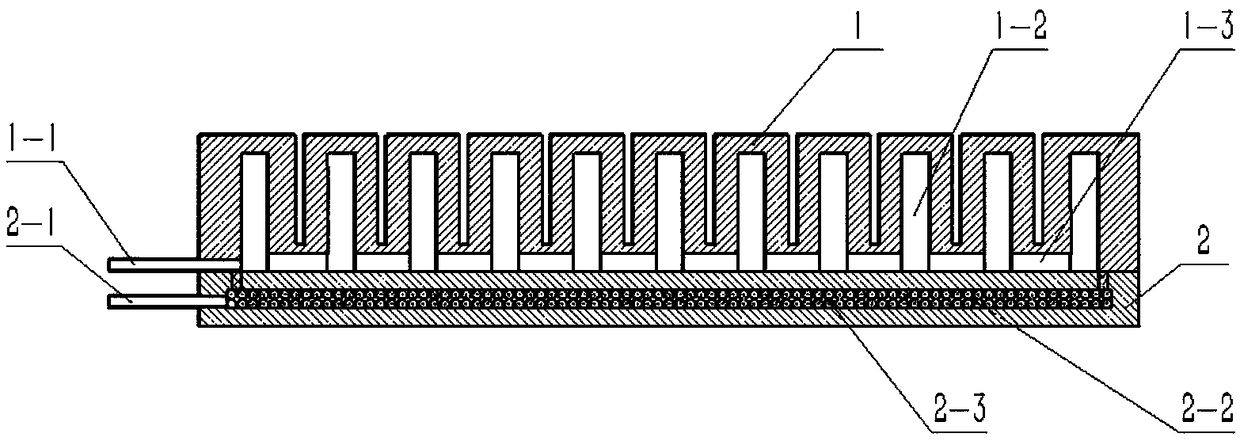
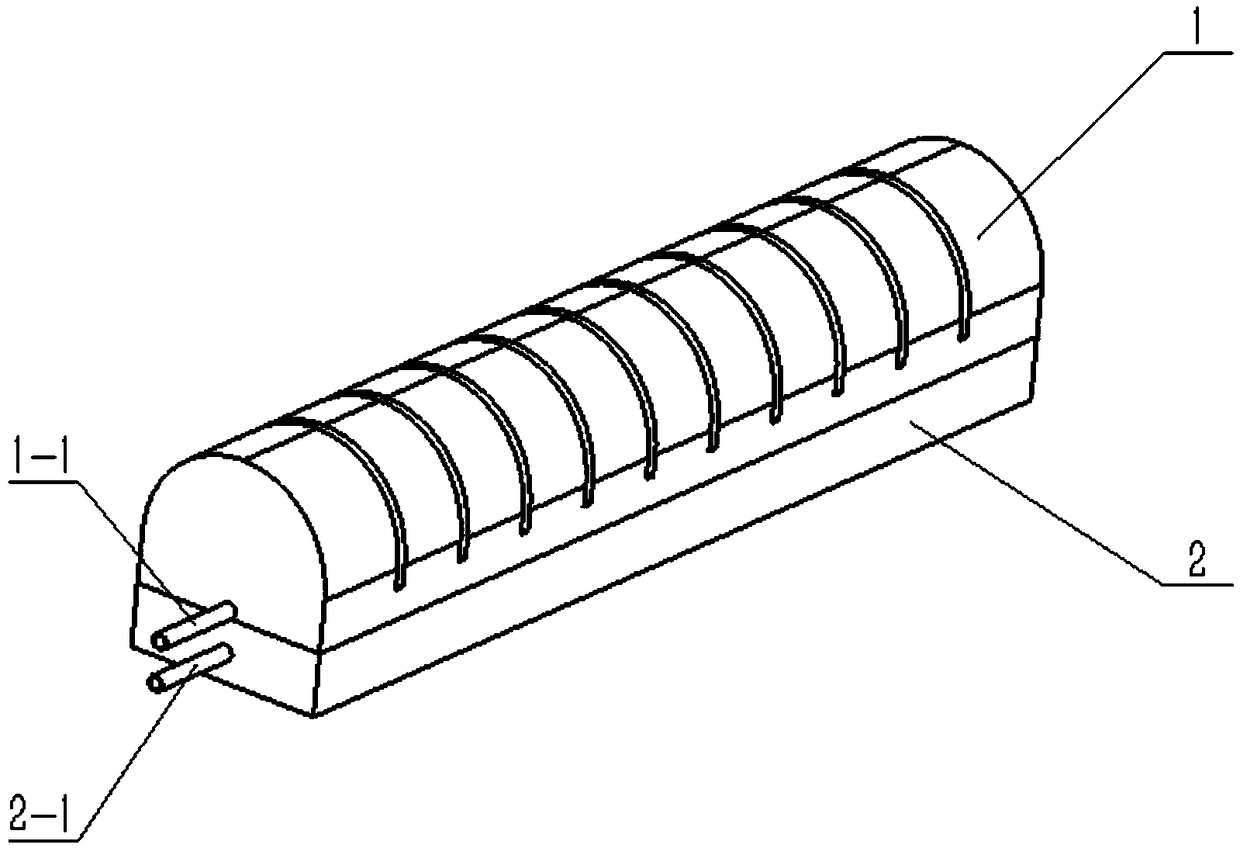
[0027] Such as figure 1 and figure 2 As shown, the independently controllable rigidity soft robot pneumatic actuator of the present invention includes a gas actuation part 1 and a stiffness adjustment part 2, the two parts are pasted and glued together, and the stiffness adjustment part 2 is in the gas Below the actuation part 1. The upper surface of the gas actuation part 1 is serrated, and the stiffness adjustment chamber 2-2 is glued on the lower surface of the gas actuation part 1 . The gas actuating part 1 and the stiffness adjusting part 2 respectively have an independent closed chamber, and the air pressure in the chamber is controlled by two external air sources respectively.
[0028] The gas actuated part 1 includes several pneumatic expansion chambers 1-2, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More