

Planar array type shear force touch sensor and shear force parameter detection method
A tactile sensor and plane array technology, applied in the field of plane array shear force tactile sensor and shear force parameter detection, can solve the problem of inability to judge the size and action position of shear force, complex sensor structure design, insufficient practical applicability, etc. problem, to achieve the effect of easy promotion, simple structure and long service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
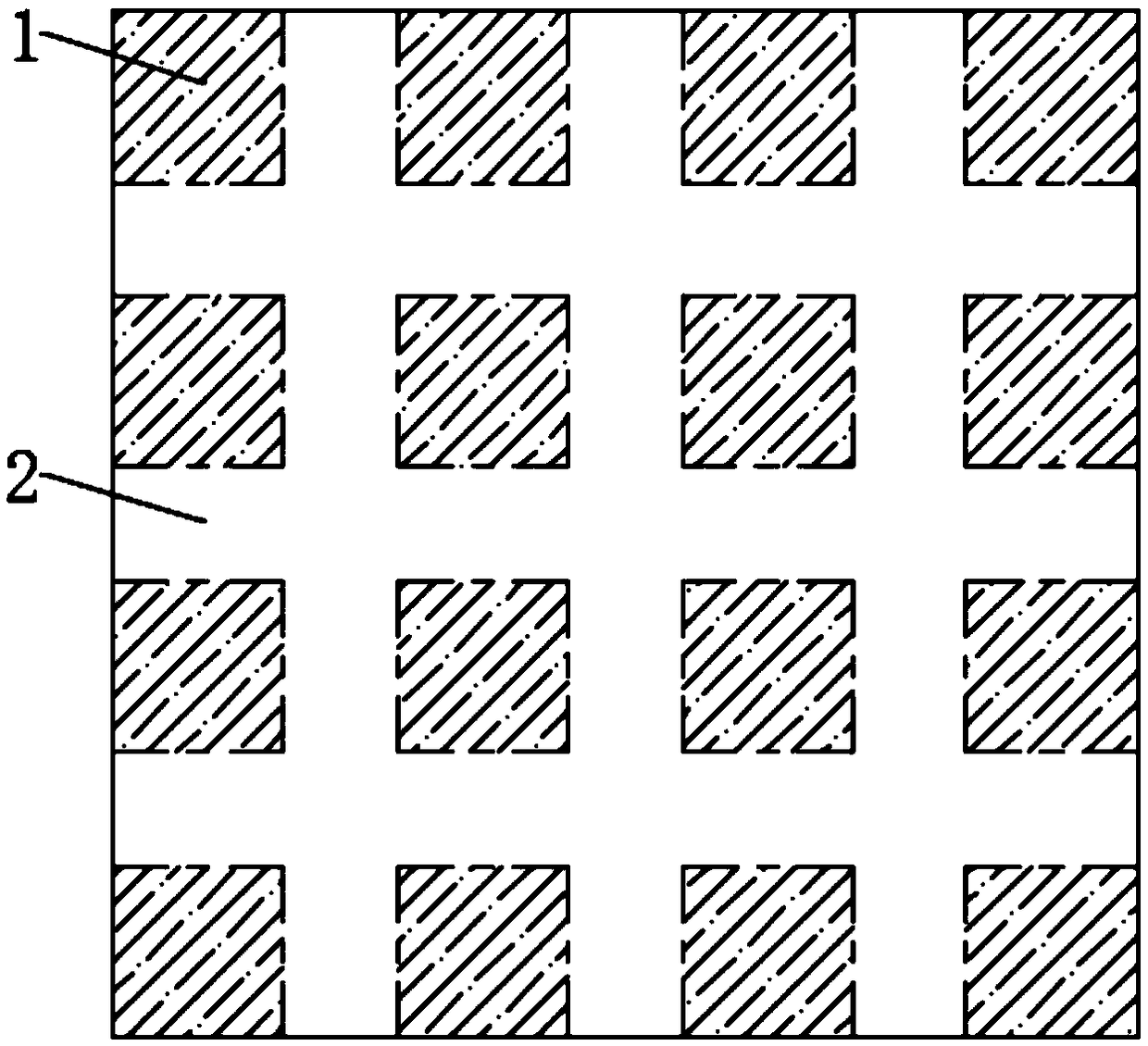
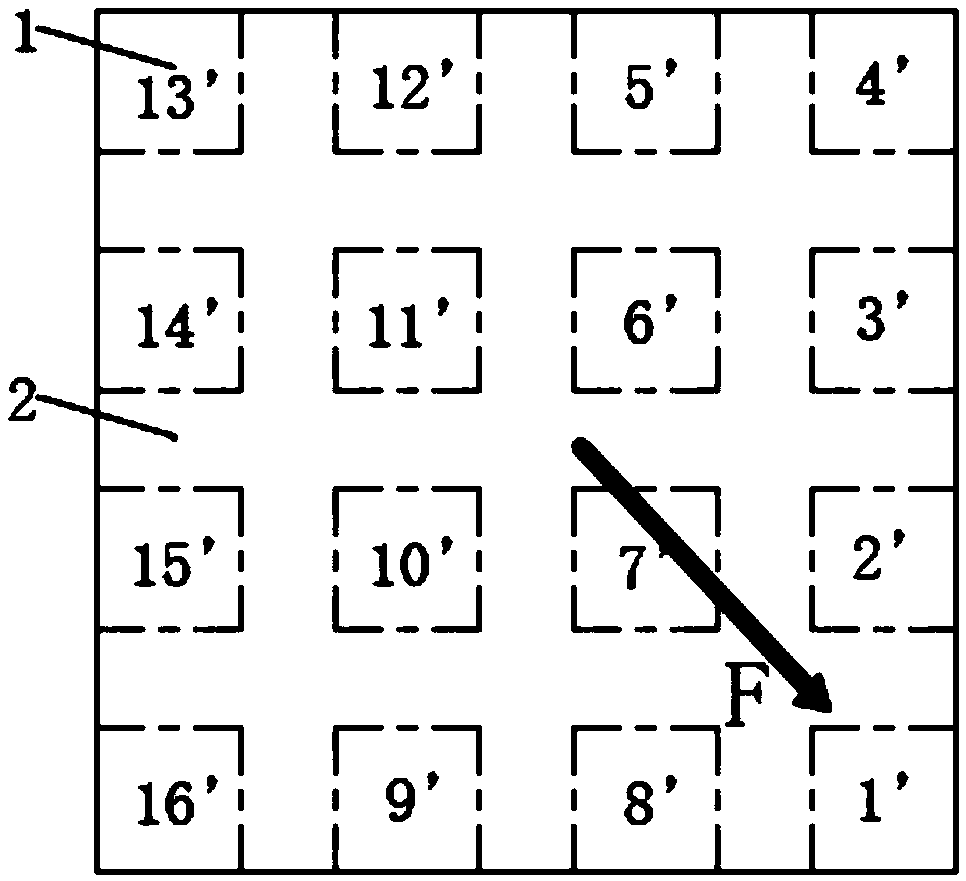
[0036] In this embodiment, the number of piezoelectric polymers 1 is 16, arranged uniformly in 4×4, numbered 1', 2', 3', 4', 5', 6', 7', 8', 9', 10', 11', 12', 13', 14', 15' and 16';
[0037] The method of detecting the magnitude of the shear force: image 3 When there is a shear force F at the position in , the piezoelectric polymers numbered 1'-16' all have charge output. When the magnitude of the shear force changes, the output charge of each numbered piezoelectric polymer also changes. When the shear force increases, the output charge also increases, and vice versa. The magnitude of the shearing force is detected by calibrating the electric charge output by the piezoelectric polymer and the shearing force.
[0038] To detect the direction of shear force: image 3 When there is a shear force F at the position in , all piezoelectric polymers 1 have charge output, and the algebraic difference is made for the charge values output by all piezoelectric polymers 1, and the t...
Embodiment 2
[0041] In this embodiment, the number of piezoelectric polymers 1 is 4, which are evenly arranged in 2×2, numbered 1", 2", 3" and 4" respectively; the piezoelectric polymer 1 is coated with electrodes on the upper and lower surfaces PVDF piezoelectric film;
[0042] The charge of the piezoelectric polymer number 1" corresponds to Figure 5 In charge 1, number 2" corresponds to the amount of charge in the piezoelectric polymer Figure 5 The charge in the charge 2, number 3" corresponds to the charge amount of the piezoelectric polymer Figure 5 The charge in the charge 3, number 4" corresponds to the charge amount of the piezoelectric polymer Figure 5 The charge in 4. Figure 5 The examples shown show that the output charge of each piezoelectric polymer 1 increases with the increase of the shear force. The charge value output by the piezoelectric polymer No. 2" is the largest, that is, the location where the shear force acts is close to it.
[0043] Charge 13 means the al...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More