

Autonomous navigation spraying robot for orchard work and working method thereof
A technology of autonomous navigation and robotics, applied in applications, animal husbandry, devices for capturing or killing insects, etc., can solve the problems of small spray coverage, inapplicability to open-air orchard environments, and inability to spray pesticides in orchards to reduce labor costs Quantity and labor intensity, quality and efficiency improvement, conversion of new and old kinetic energy, good effect of canopy penetration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
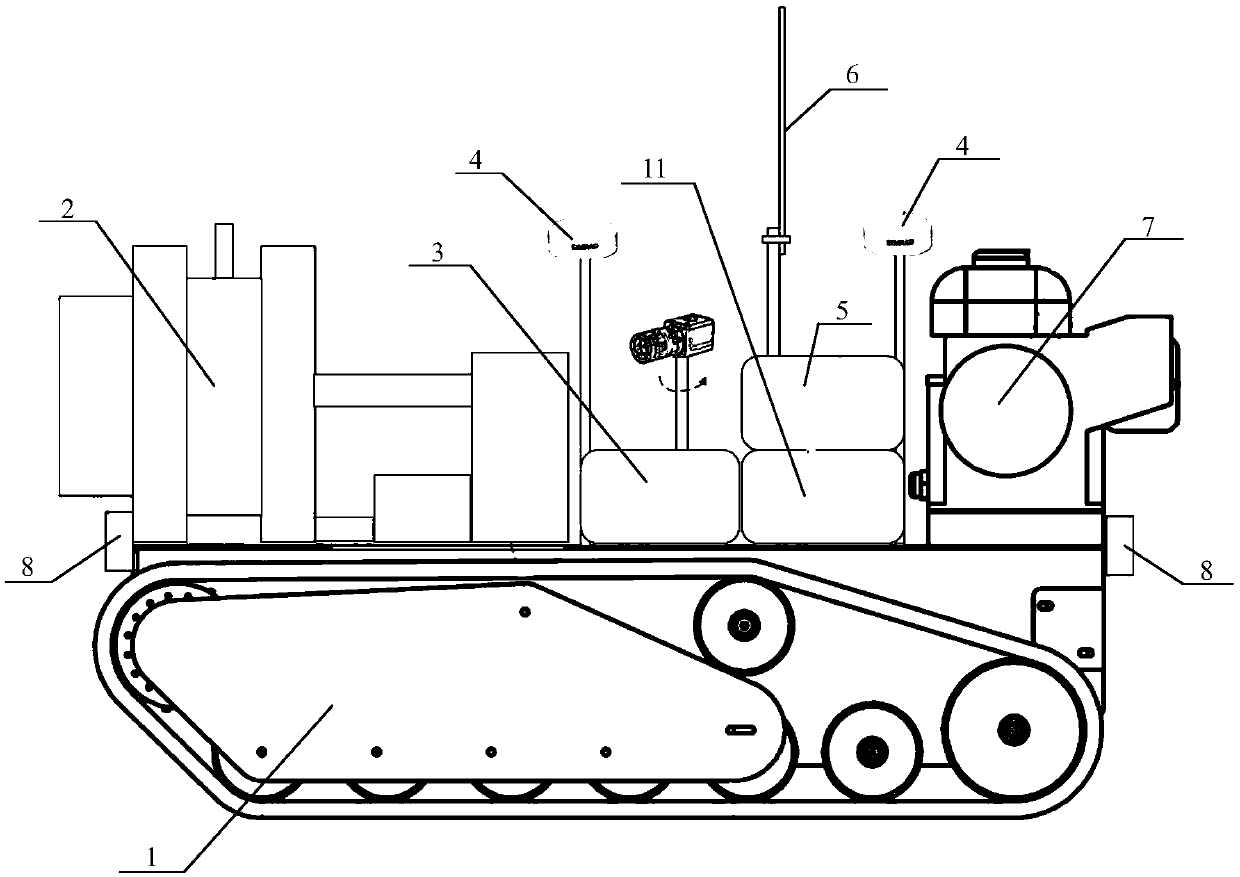
[0048] Such as Figure 1-4 As shown, an autonomous navigation spraying robot for orchard operations, including the robot body and auxiliary equipment;
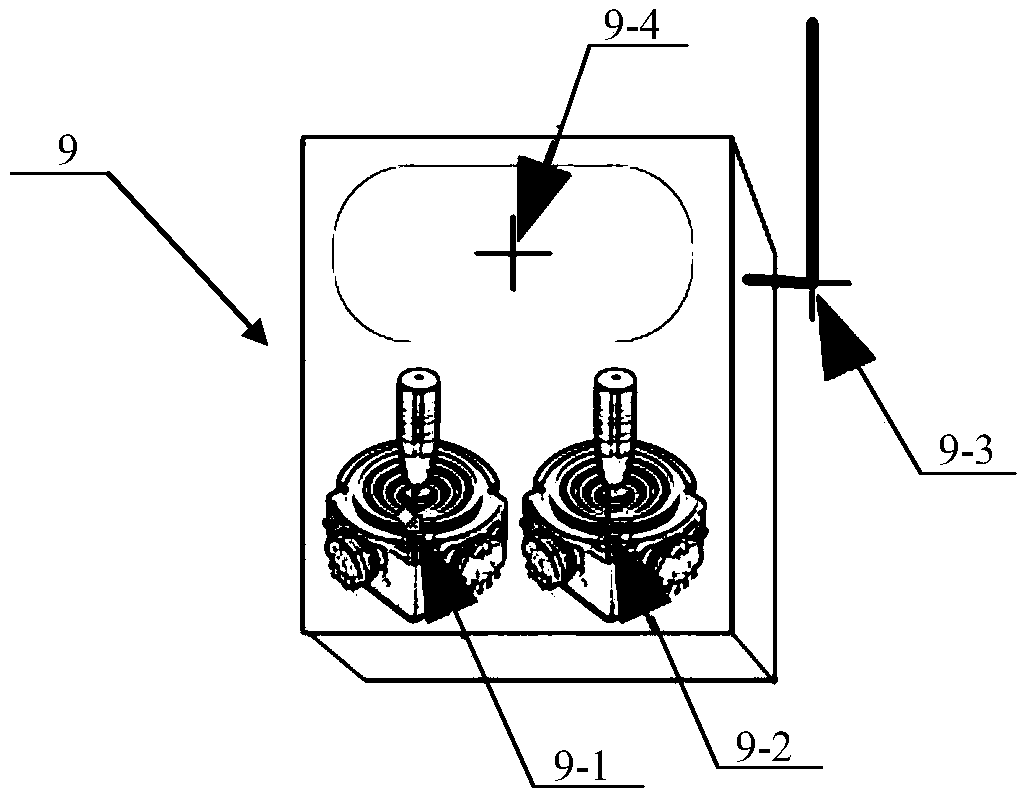
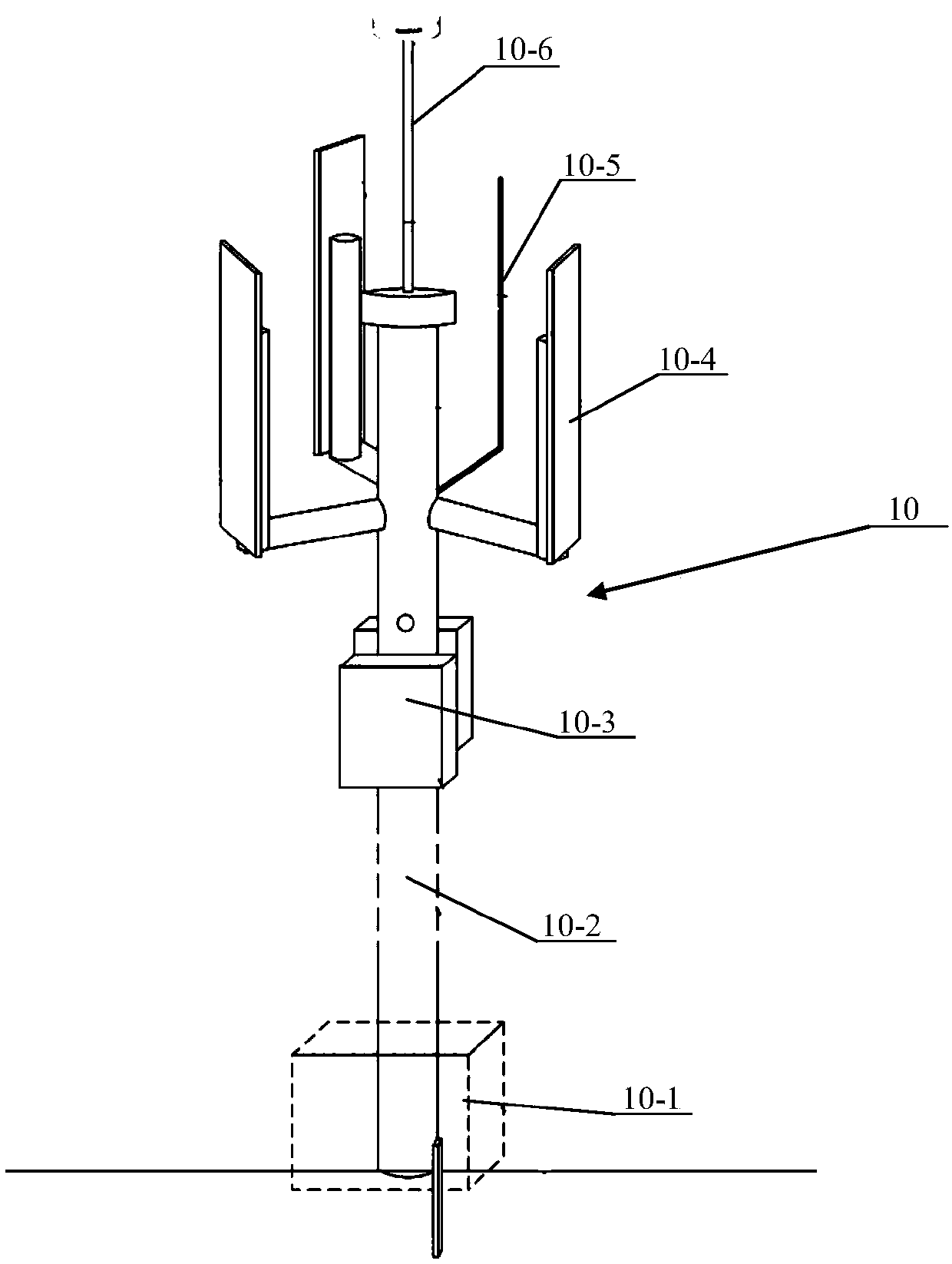
[0049] The robot body includes a mobile chassis 1, and an air-driven spraying device 2, an inertial navigation device 3, a satellite positioning device 4, a control system 5, a remote communication device 6 and a power supply for the spraying robot provided on the mobile chassis 1. The energy power system 7, the front and rear ends of the robot body are equipped with a radar obstacle avoidance device 8; the auxiliary equipment includes a remote controller 9 and a communication base station 10;
[0050] The air-driven spraying device 2, the inertial navigation device 3, the satellite positioning device 4, the energy power system 7 and the radar obstacle avoidance device 8 are all connected to the control system 5, and the control system 5 is connected to the mobile chassis 1 to control the advancement of the mobile chassis 1 ,...
Embodiment 2
[0053] An autonomous navigation spraying robot for orchard operations, the structure is as shown in Embodiment 1, the difference is that the robot body also includes a state sensing system 11, and the state sensing system 11 includes a liquid level sensor located in the air-driven spraying device 2. Sensors, the power sensor located in the energy power system 7, the speed and heading sensor located in the inertial navigation device 3, the position sensor located in the satellite positioning device 4, and the camera located on the robot etc. are all connected to the control system 5 for real-time sensing medicine. Fluid volume, electric quantity, position, speed, course and video etc., and can realize remote transmission through telecommunication device 6.
Embodiment 3
[0055] An autonomous navigation spraying robot for orchard operations, as shown in Embodiment 1, the difference is that the mobile chassis 1 is a wheeled chassis or a crawler chassis, and the robot uses a wheeled or crawler chassis as a carrier and mobile platform.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More