

Target detection method and device applied to unmanned ship perception system
A technology of target detection and perception system, which is applied in the field of target detection method and device of unmanned ship perception system, can solve the problems of poor detection effect, poor real-time performance, low precision and accuracy rate of the perception system, and achieve good classification effect, good The effect of real-time and high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] The invention provides a target detection method applied to an unmanned ship perception system, which can complete the target detection to meet the requirements of the unmanned ship environment perception system. This method is mainly based on the convolutional neural network, using the feature extraction ability of the convolutional neural network to extract more robust features, so that the target to be detected can be changed to a good description, thereby improving the robustness of the model to dynamic scenarios.
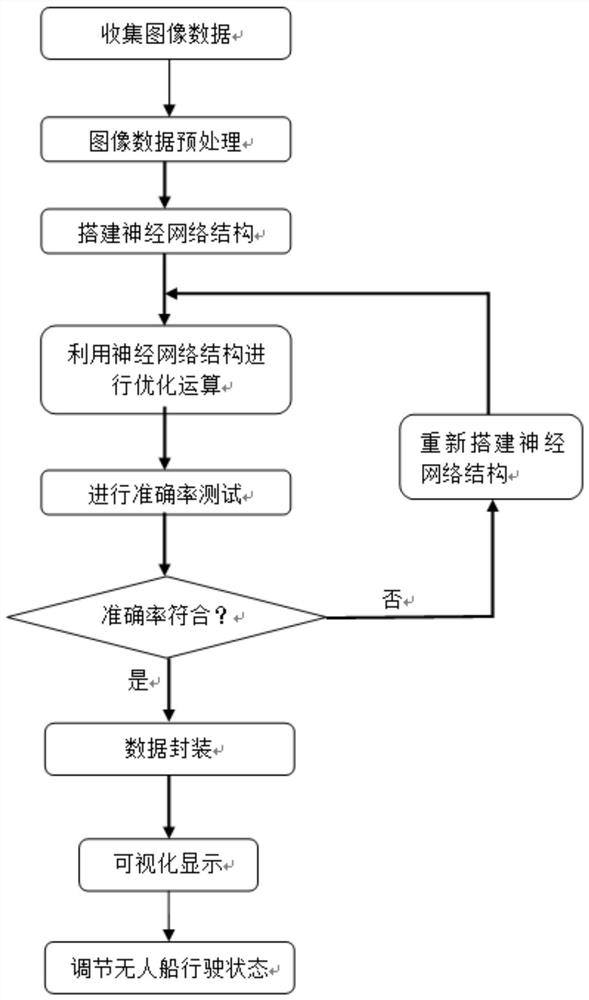
[0052] Such as figure 1 As shown, it is a flow chart of the target detection method applied to the unmanned ship perception system provided by the present invention, and the target detection method applied to the unmanned ship perception system includes the following steps:
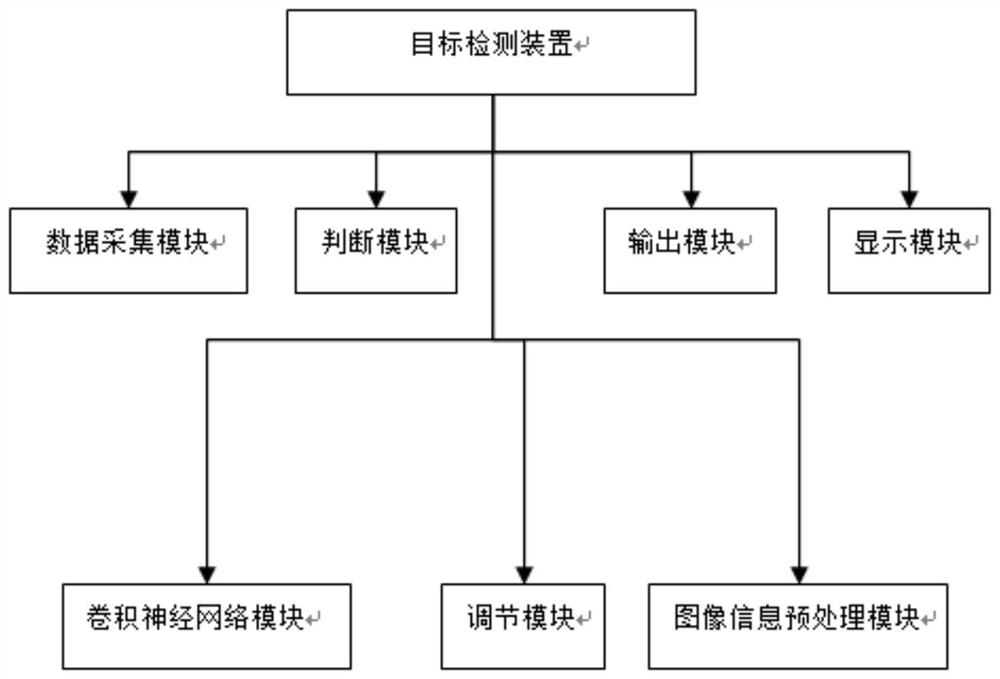
[0053] Step 1: collect image data through the data acquisition module;
[0054] Step 2: Preprocessing the image data collected by the data acquisition module through the image info...
Embodiment 2
[0062] As described above, the target detection method applied to the unmanned ship perception system, the difference of this embodiment is that in the first step, the image data is collected using a camera with night vision function to take pictures of the environment around the ship For pictures, the camera is installed on a support that can rotate 360 degrees, and the support is rotated by the data acquisition module, so that the picture can be taken at any time and at any position;
[0063] Image data includes: water surface data, road surface data sets, shore data sets, obstacles (reefs, etc.), other ship data sets, and other data sets.
[0064] In the second step, the preprocessing of the image data is specifically performing Gaussian smoothing filter processing on the pictures collected by the camera using opencv, and extracting a target area with an image size of 224×224 as input data.
Embodiment 3
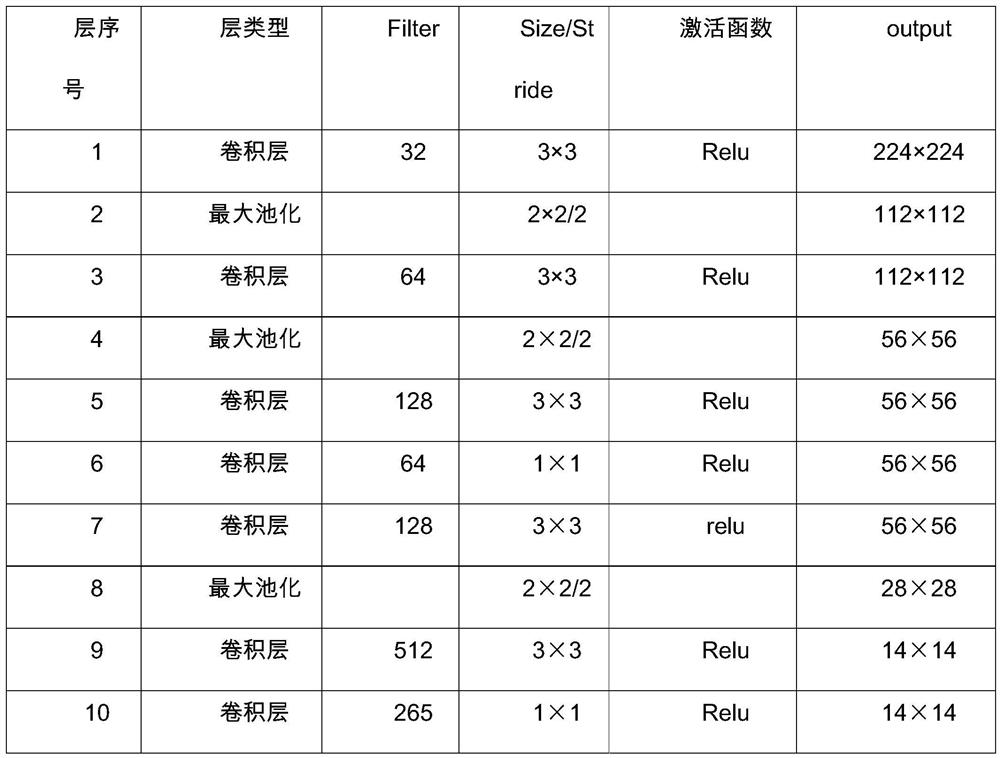
[0066] As described above, the target detection method applied to the unmanned ship perception system, the difference of this embodiment is that in the third step, the neural network structure is built through the convolutional neural network module, and the convolutional neural network is used to sacrifice the width. and height to increase the channel features, and at the same time combine pooling and fully connected layers to build a network, use the gradient descent method as an optimization method to find a local optimal solution, input 224×224 data, after the data passes through the convolutional neural network, get Output the result.
[0067] Specific steps are as follows:
[0068] The first layer is the convolution layer, which performs convolution operation on the input data of 224×224, uses 32 convolution kernels with a size of 3×3 for convolution, and the output data size is 224×224;
[0069] The second layer is the maximum pooling layer, the convolution kernel size...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More