Node deployment and positioning method for patrol inspection of unmanned aerial vehicles in ecological environment
A positioning method and node deployment technology, which can be applied to services based on specific environments, satellite radio beacon positioning systems, services based on location information, etc., and can solve the problems of limited hardware cost and power consumption, and low positioning accuracy. To achieve the effect of saving cost and power consumption, high positioning accuracy and strong maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
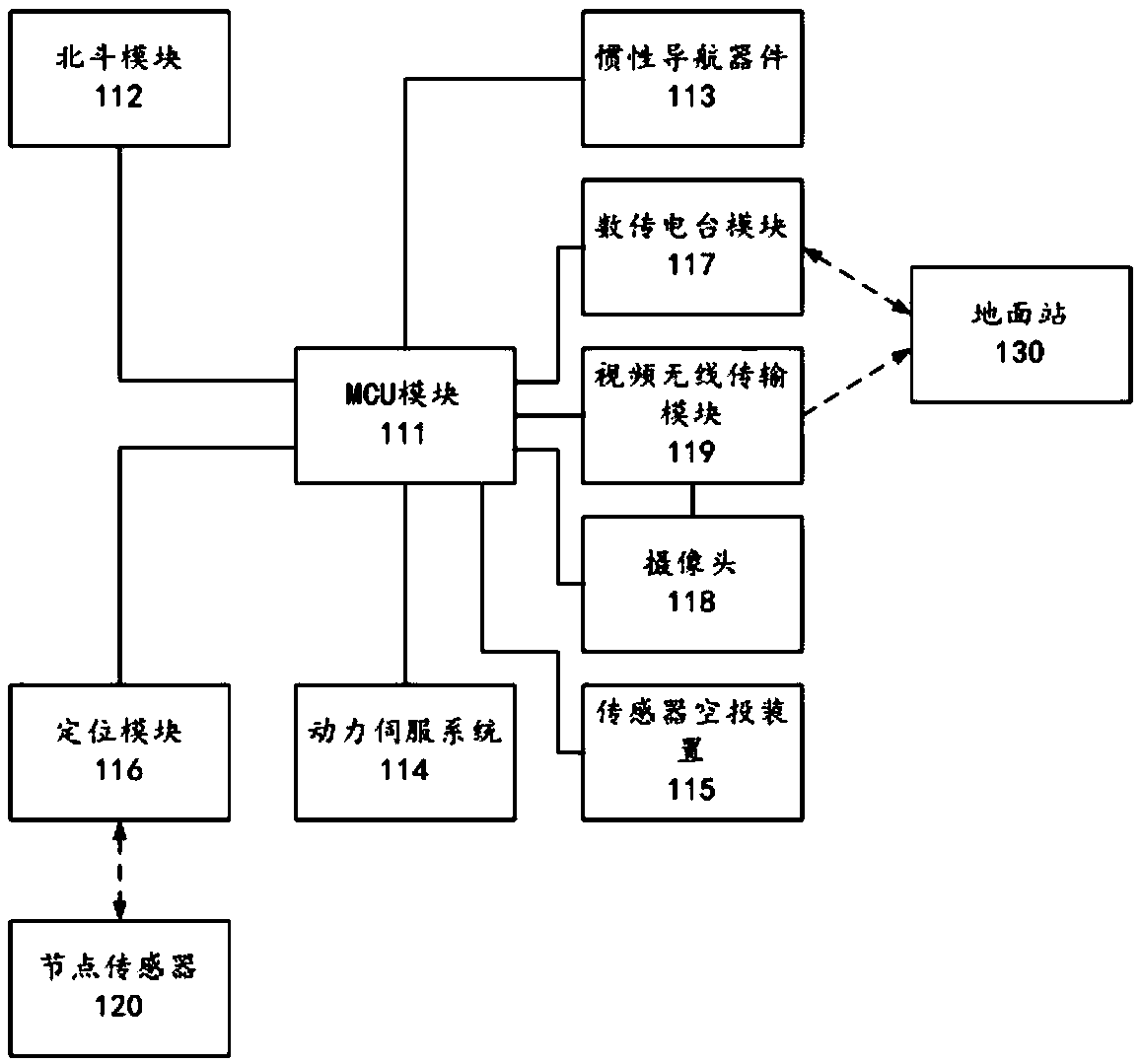
[0030] A node deployment and positioning method for ecological environment UAV inspection, including:
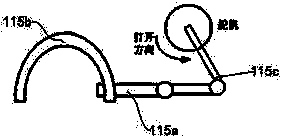
[0031] 1. The UAV 110 navigates through the navigation system, and airdrops multiple node sensors 120 to corresponding preset airdrop areas.
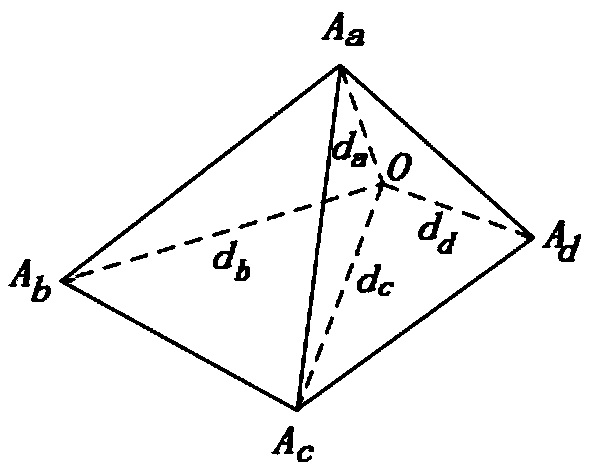
[0032] Two, using the four-sided measurement method, using the UAV 110 itself as the anchor node to locate each node sensor 120 airdropped:
[0033] 1. The UAV navigates through the navigation system and flies to four different locations as four anchor nodes. The four anchor nodes are not in the same plane, and the coordinates of the four are A a (x a ,y a ,z a ), A b (x b ,y b ,z b ), A c (x c ,y c ,z c ) and A d (x d ,y d ,z d ), see figure 2 , O in the figure represents the node sensor, and the coordinates of the anchor node are provided by the Beidou positioning system;
[0034] 2. Detect the distance d between the anchor node and the node sensor 120 a , d b , d c and d d , the traditional TOA algorithm has r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com