

Flight robot arm system based on force feedback device and VR sensing, and control method
A technology of mechanical arm and force feedback, applied in the field of drones, can solve the problems of increasing load volume and cost, low observation accuracy and efficiency, and not really realizing stereo vision, so as to achieve the effect of reducing difficulty and precise adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples, but the protection scope of the present invention is not limited to the following specific examples.
[0051] System embodiment
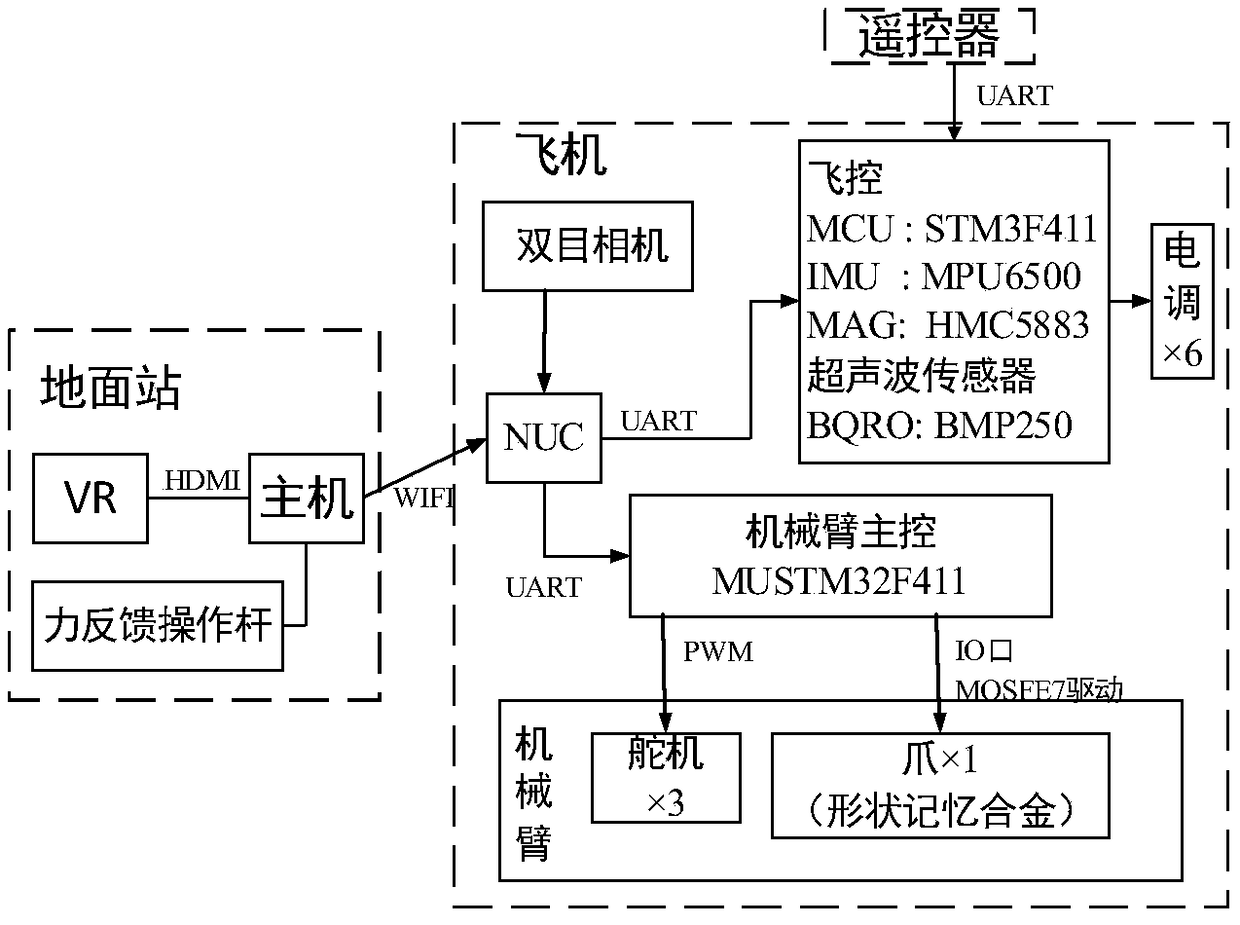
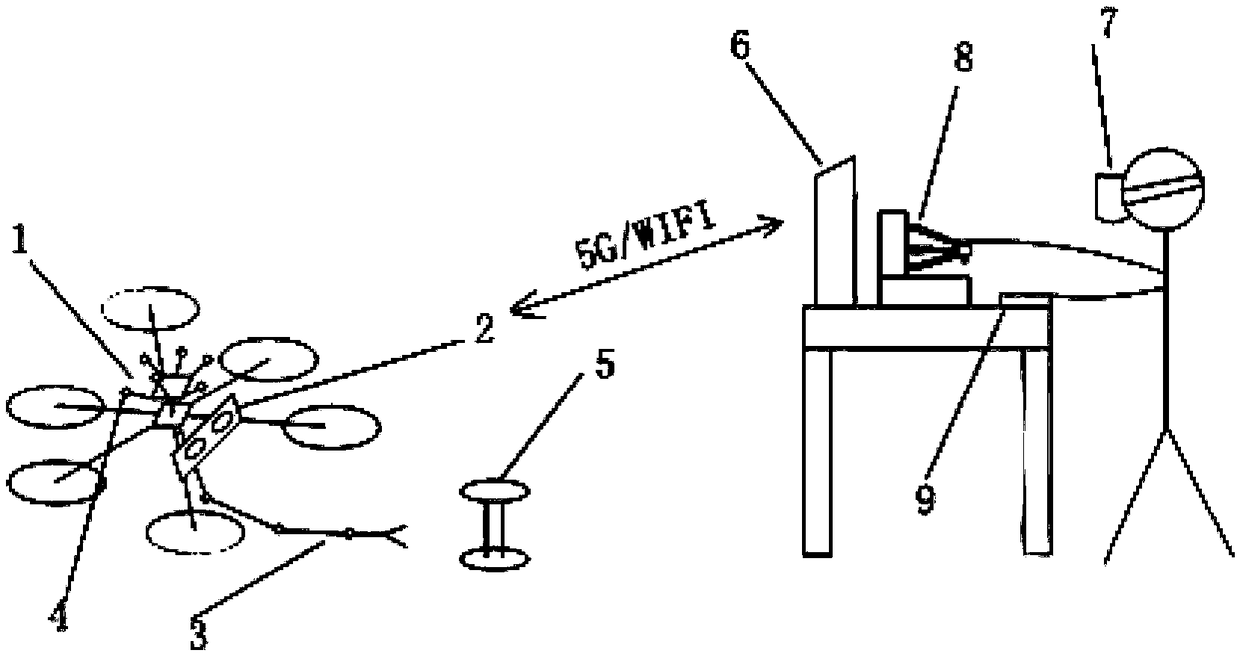
[0052] Such as figure 1 and 2 As shown, a flying manipulator system based on force feedback device 8 and VR perception includes a UAV part and a ground station part, and the UAV part includes a UAV body 1, a binocular camera 2, an airborne Computer, mechanical arm 3, control system and visual label 4, the onboard computer is a UNC small computer. The visual tag 4 is used to match and identify the object to be grasped. The control system includes a flight master and a robot arm master. The flight master includes MCU, IMU, MAG, BQRO and ultrasonic sensors. The flight master and the robot arm The main control is installed on the flight control boar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More