Electromechanical device abnormal alarm stop control system and control method
A technology of electromechanical equipment and control system, which is applied in the direction of electric speed/acceleration control, chemical instruments and methods, mixers, etc., can solve problems such as reducing resistance torque, and achieve the effect of reducing damage, easy implementation and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0043] It should be understood that terms such as "having", "comprising" and "including" as used herein do not entail the presence or addition of one or more other elements or combinations thereof.
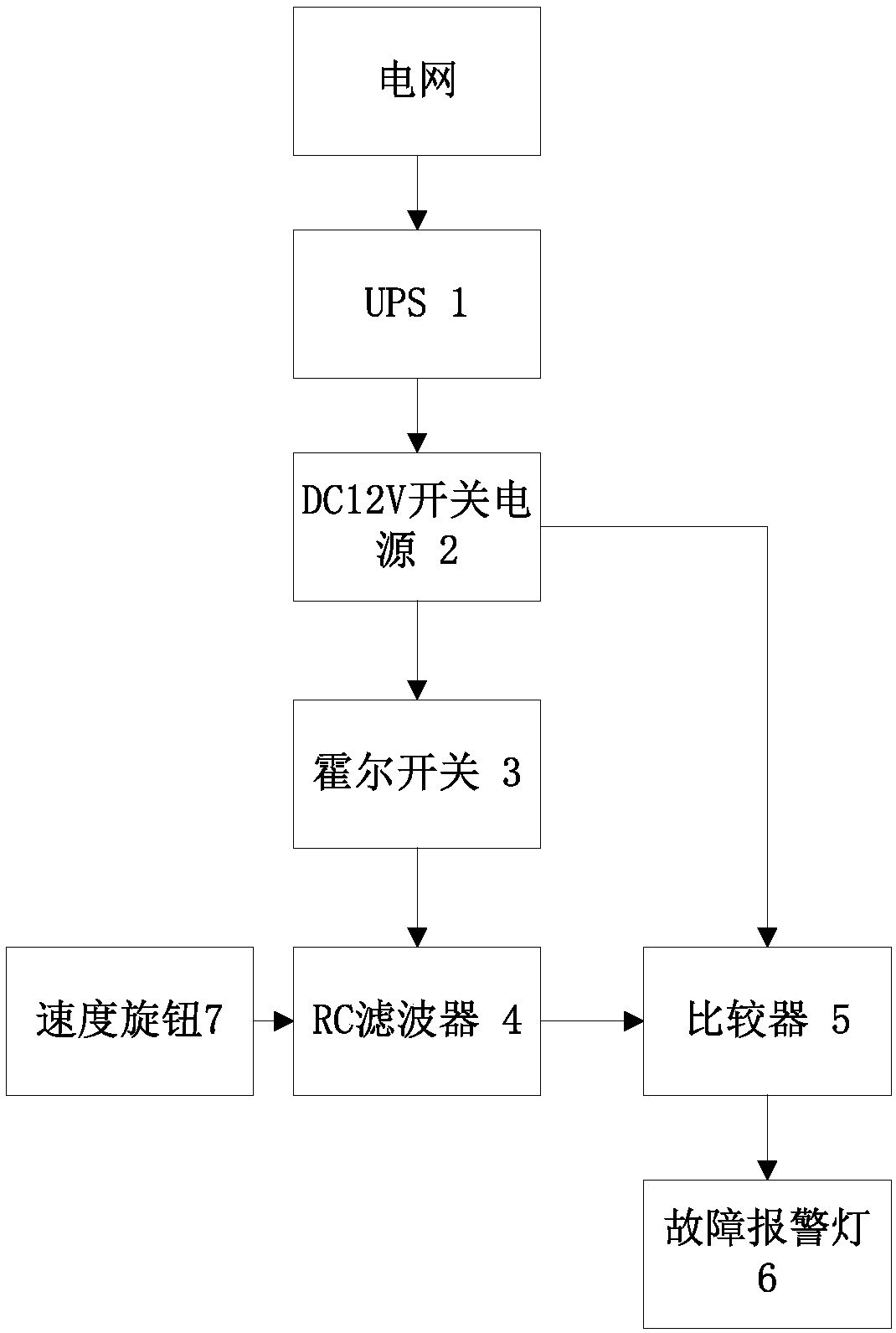
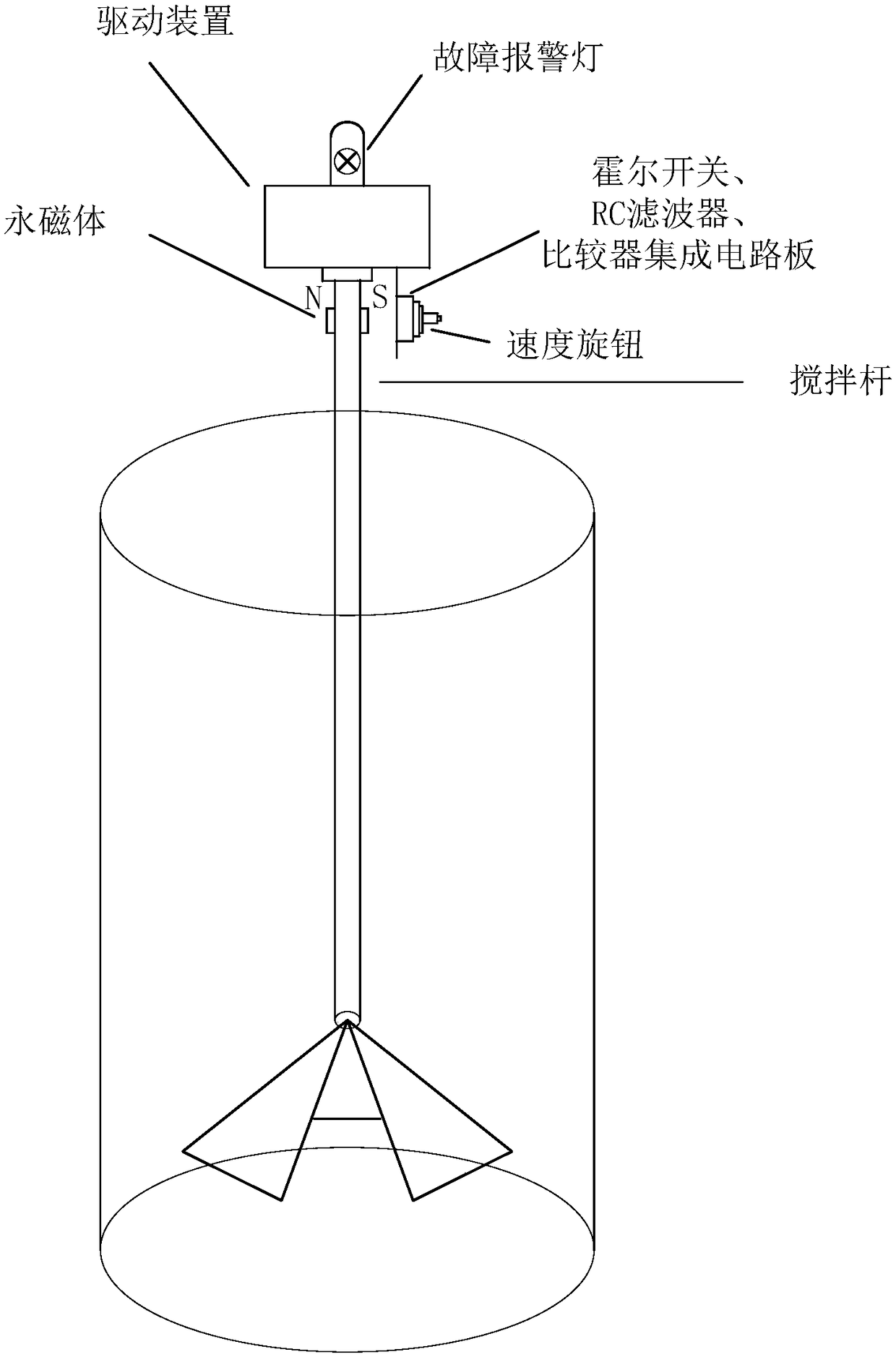
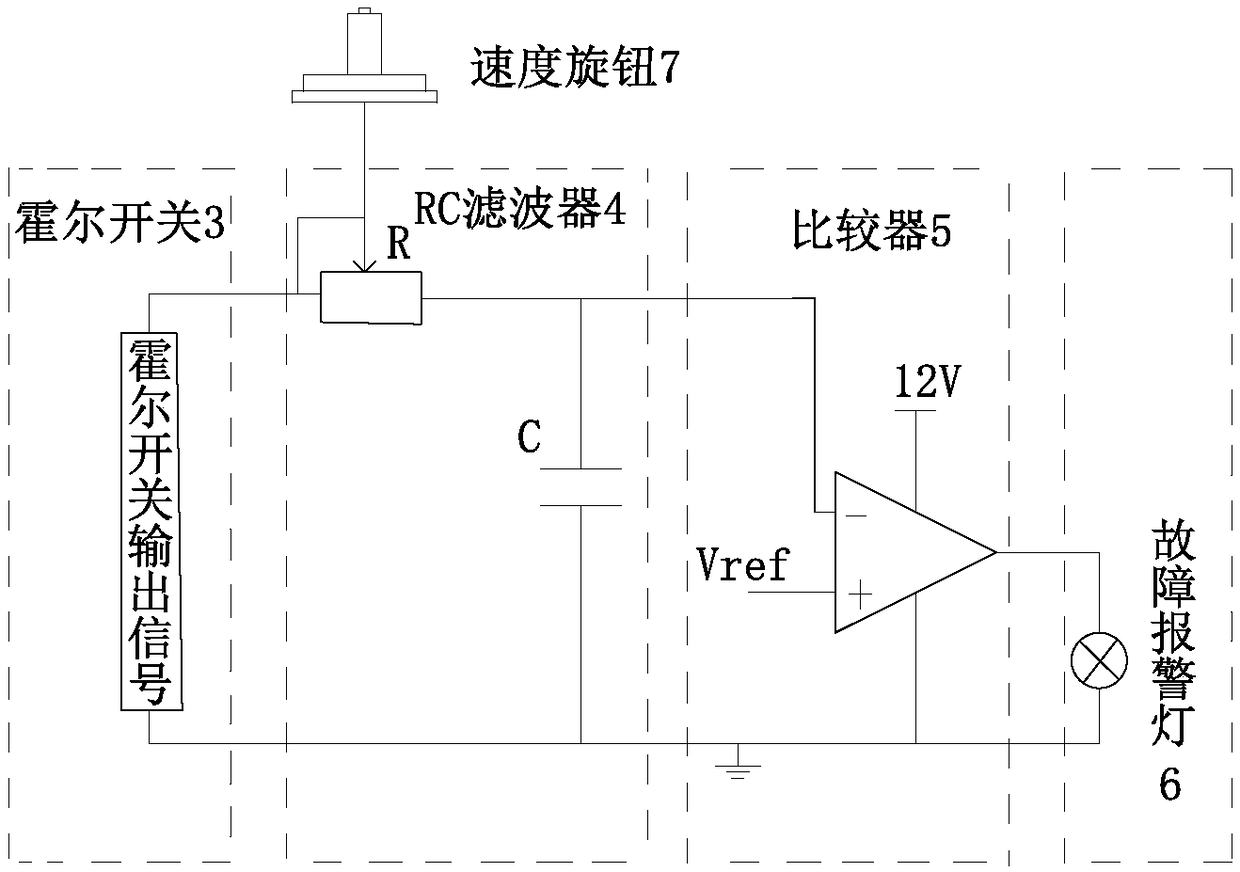
[0044] Such as Figure 1 to Figure 3As shown, the present invention provides an alarm control system for abnormal stop of electromechanical equipment, including UPS1, DC12V switching power supply 2, Hall switch 3, RC filter 4, comparator 5, fault alarm lamp 6, and speed knob 7.
[0045] The upper end of the electromechanical equipment is suspended to fix a driving device, which can be fixed on the upper end of the electromechanical equipment through a support frame. A driving motor is arranged in the driving device, and the driving shaft of the driving motor is arranged verticall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com