

Building climbing method and device capable of automatically adjusting and steering
A stair-climbing device and automatic adjustment technology, applied in two-dimensional position/channel control, motor vehicles, transportation and packaging, etc., can solve the problems of low safety factor, unsafe, inconvenient human operation, etc., and achieve a convenient physical state monitoring, high safety and stability coefficient, and good monitoring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
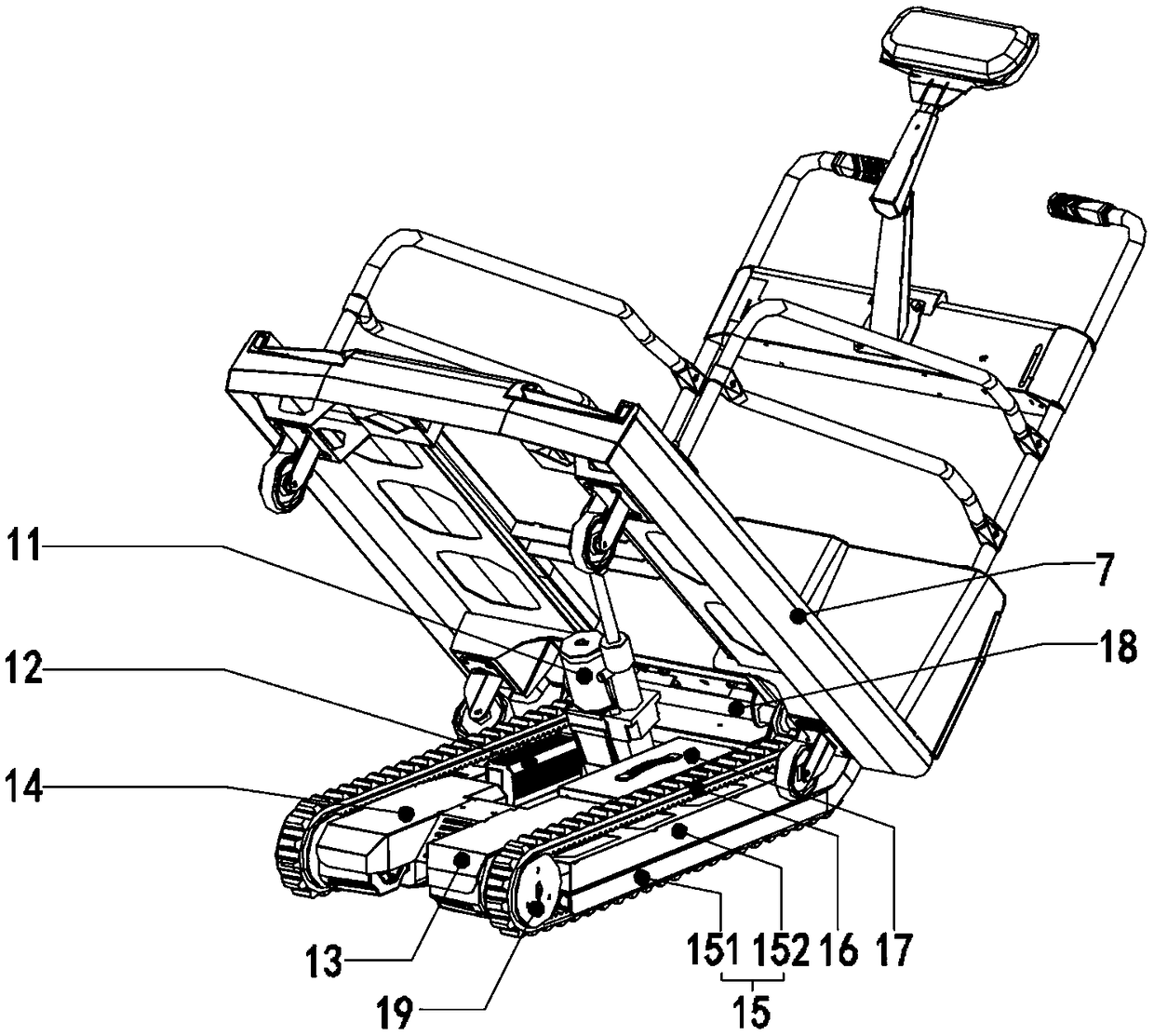
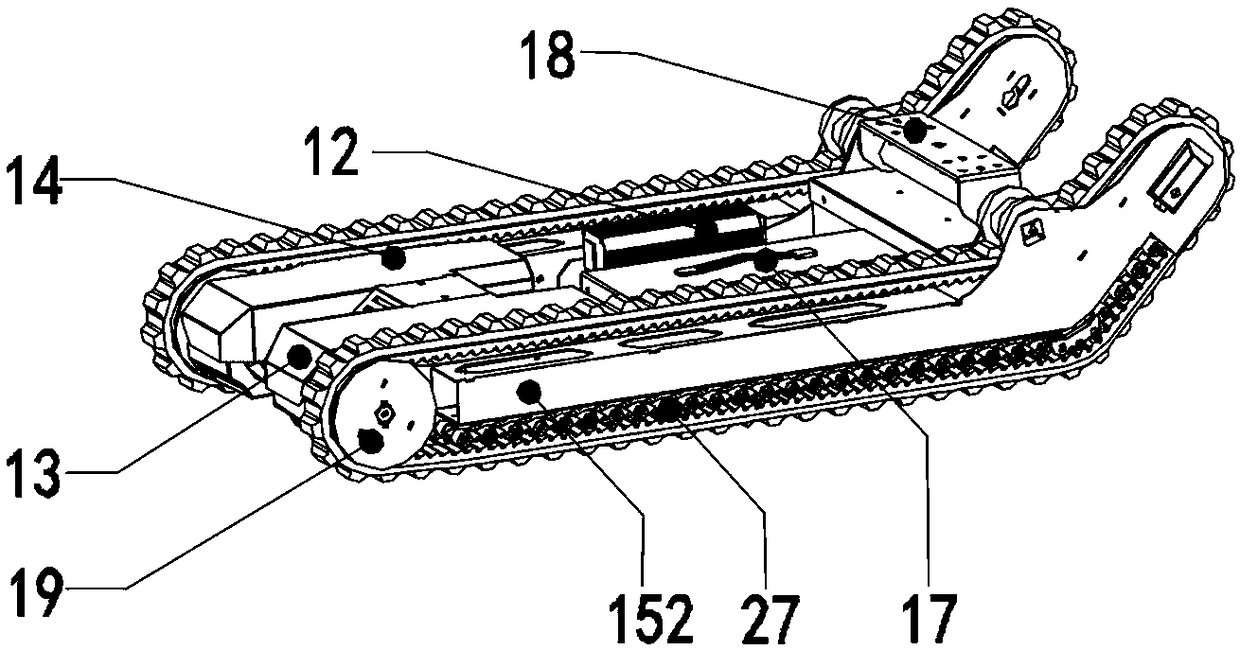
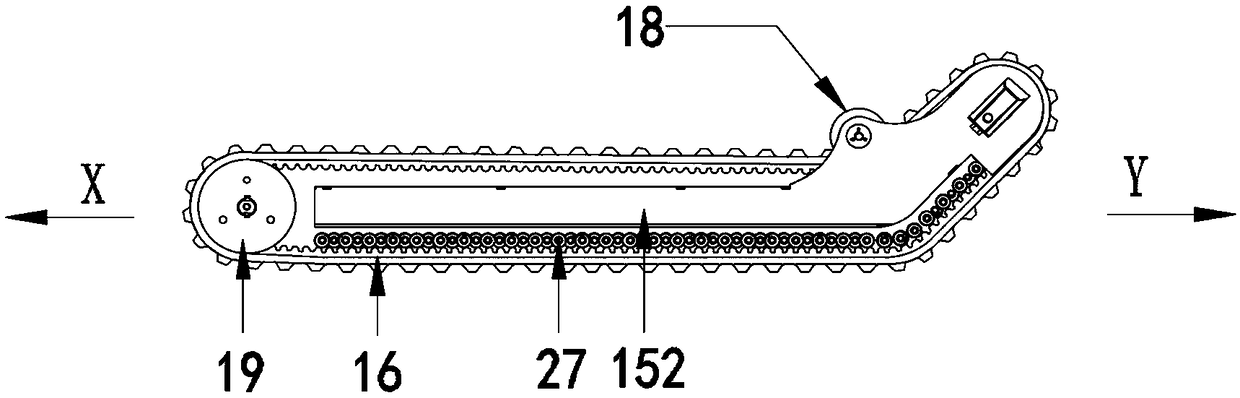
[0038] like figure 1 As shown, a stair-climbing device that can automatically adjust steering includes a loading platform 7, a push rod, a crawler chassis 15, a left motor 131, and a right motor 141. The rear end of the platform and the rear end of the crawler chassis pass through a bearing or a rotating sleeve The pipe structure 18 is connected, and wheels 19 are arranged on the left and right sides of the front and rear ends of the chassis 15, and track belts 16 are respectively wound on the left wheel 19 and on the right wheel 19, and the internal teeth of the track belt 16 adopt HTD -M teeth, the left motor 131 drives the left wheel 19 to rotate, and the right motor 141 drives the right wheel to rotate, characterized in that:
[0039]A three-axis sensor is provided on the stair climbing device to detect whether the forward direction of the stair climbing device deviates;
[0040] When a deviation is detected, the control device automatically judges the direction and degre...
Embodiment 2
[0067] According to the technical solution of the present invention, there is also provided a stair climbing method that can automatically adjust the steering, and judge whether the forward direction of the stair climbing device deviates and deviates according to the three-axis sensor and / or external sensor arranged on the device degree; when an offset is detected, the control device automatically controls the steering and rotation speed of the left motor and / or the right motor according to the offset direction and the offset degree, so as to realize the steering adjustment in the process of climbing stairs.
[0068] The travel mode of the stair climbing device includes a forward mode, a backward mode, a left-turn mode, and a right-turn mode, wherein the first drive current and the second drive current respectively drive the forward rotation or reverse rotation of the left motor and the right motor, thereby realizing forward rotation , back, turn left or right;
[0069] The fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More