

Control system for strapdown guidance unmanned aerial vehicle
A control system and unmanned aerial vehicle technology, applied in the direction of control/adjustment system, attitude control, non-electric variable control, etc., can solve the problems that the MAVLink protocol cannot be improved, the complexity of the electrical interface is increased, and the reliability of use is reduced. Achieve the effects of reducing the number of transmission interfaces, large market potential, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below with reference to the accompanying drawings and examples.
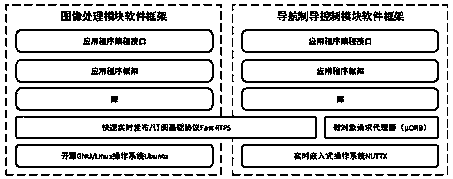
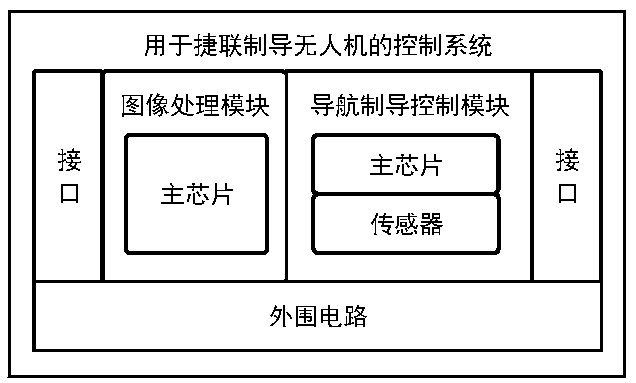
[0027] The invention provides a control system for a strapdown guided unmanned aerial vehicle, comprising an image seeker, an image processing module and a navigation guidance control module; figure 1 It is a schematic diagram of the hardware structure of the present invention, figure 2 It is a schematic diagram of the software framework of the present invention.
[0028] The image seeker is strapped down to a specific position of the UAV (head or belly) to capture image information of the target area; the image seeker is a replaceable photoelectric device, which can be a visible light camera or an infrared camera The camera can be adapted and replaced according to different usage scenarios.
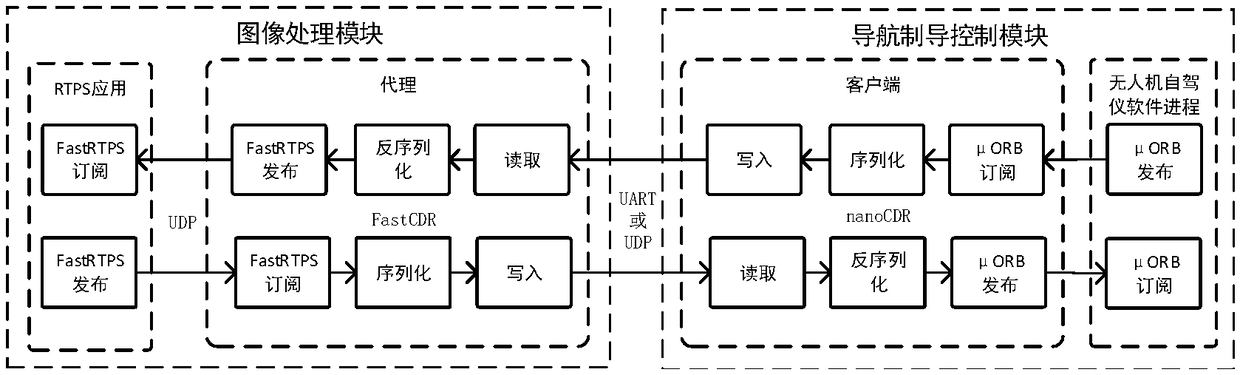
[0029] The image processing module encodes and packages the environmental image information collected by the image seeker, transmits it to the ground station thro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More