

A zero-point calibration method for a two-degree-of-freedom high-speed parallel robot
A robot and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as restricting the efficiency of the zero-point calibration process, reducing the automation degree of the calibration process, and difficulty in measuring noise and noise characteristics to improve robustness. and accuracy, improve efficiency, guarantee the effect of robustness and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be described in detail below with reference to the accompanying drawings and specific implementation cases.
[0070] Taking the calibration system in the Chinese invention patent "A Zero Point Calibration Method of Two Degrees of Freedom High-speed Parallel Robot" (ZL201410364282.3) as an implementation example, the specific implementation of the present invention is as follows:
[0071] 1. Establish the mapping model between the robot zero point error and the end motion error
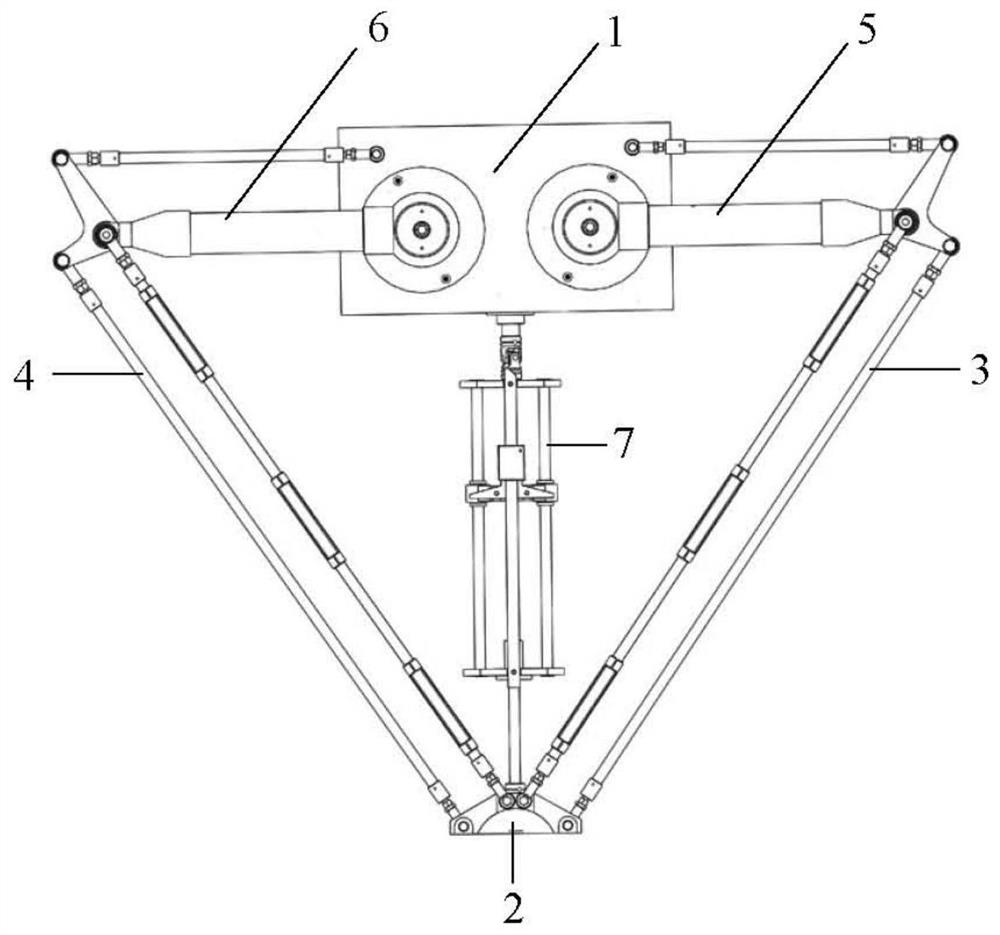
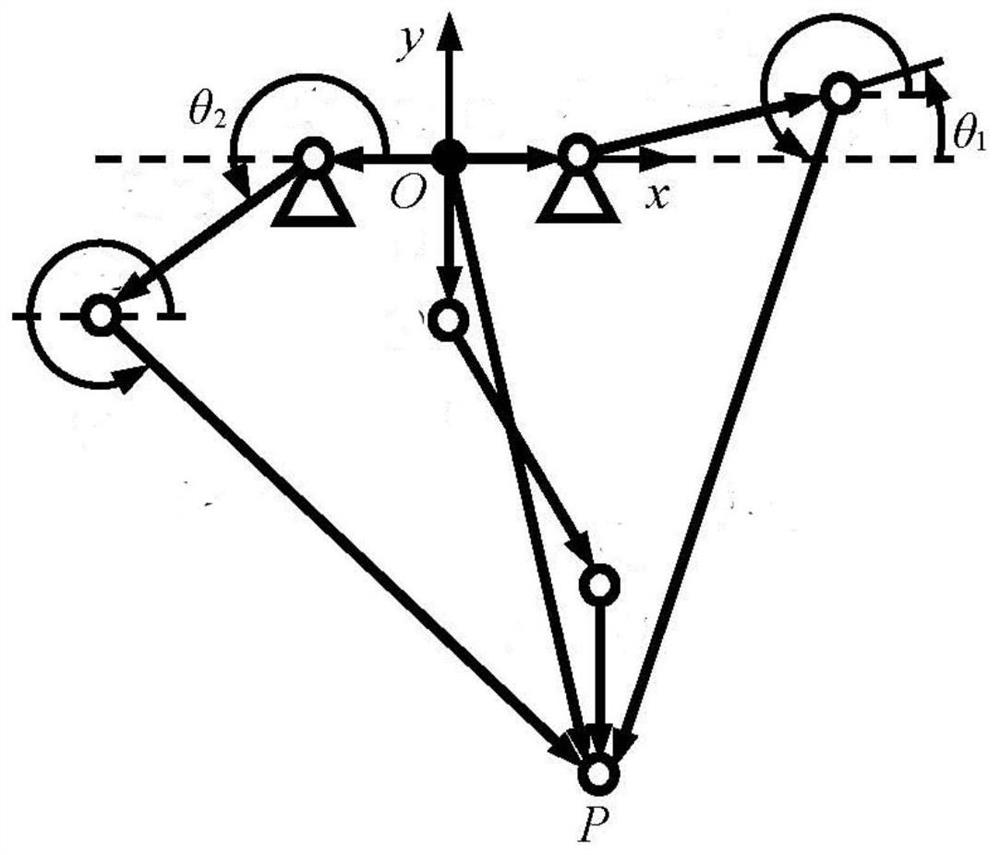
[0072] like figure 1 As shown, the two-degree-of-freedom high-speed parallel robot is composed of a static platform 1 , a moving platform 2 , a first moving branch 3 and a second moving branch 4 . A telescopic ruler 7 is installed between the static platform 1 and the moving platform 2, and the two ends of the telescopic ruler 7 are respectively connected with the static platform 1 and the moving platform 2 through a rotating pair. like figure 2 As shown, the dista...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More