

Device and control method for walking balance of tea garden harvesting robot
A balancing device and robot technology, applied to the chassis of picking machines, harvesters, and agricultural machinery, etc., can solve problems such as easy to overturn, affect the germination of new shoots on the lower wheel, and increase the difficulty of track manufacturing and installation, so as to prevent overturning dangerous effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
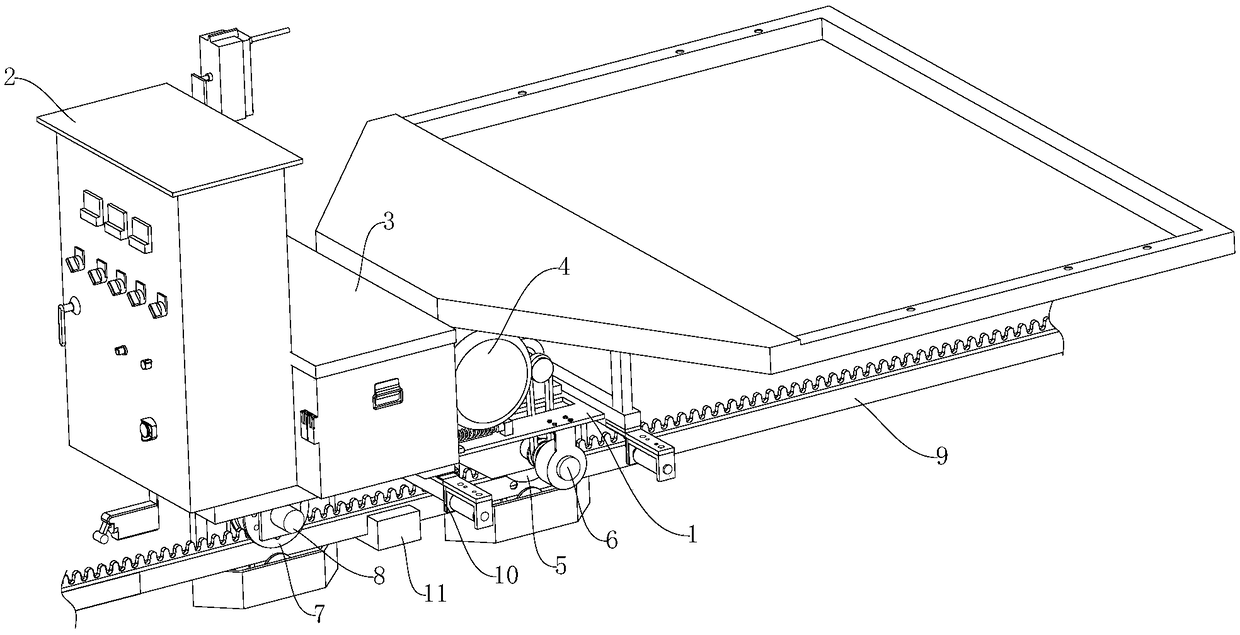
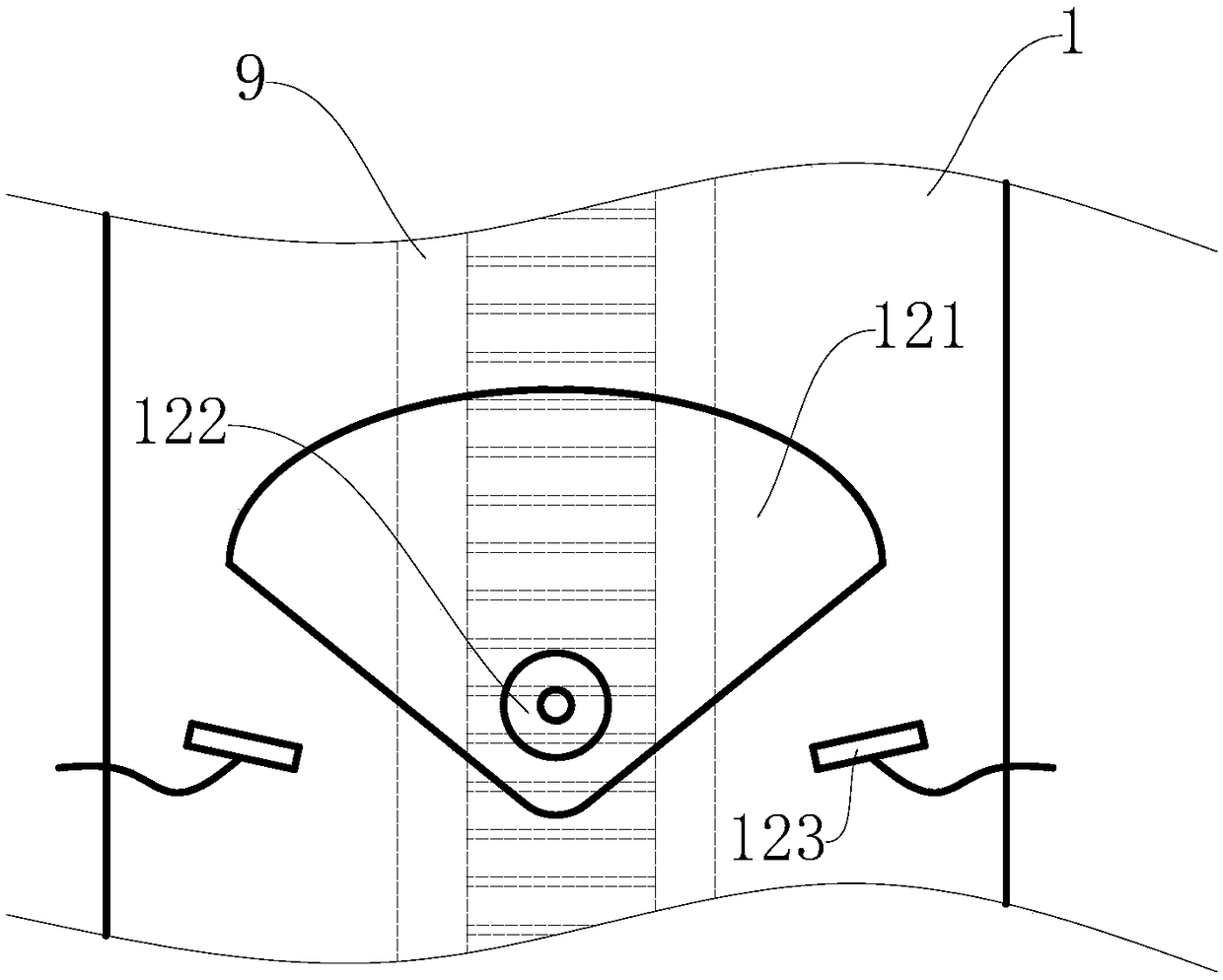
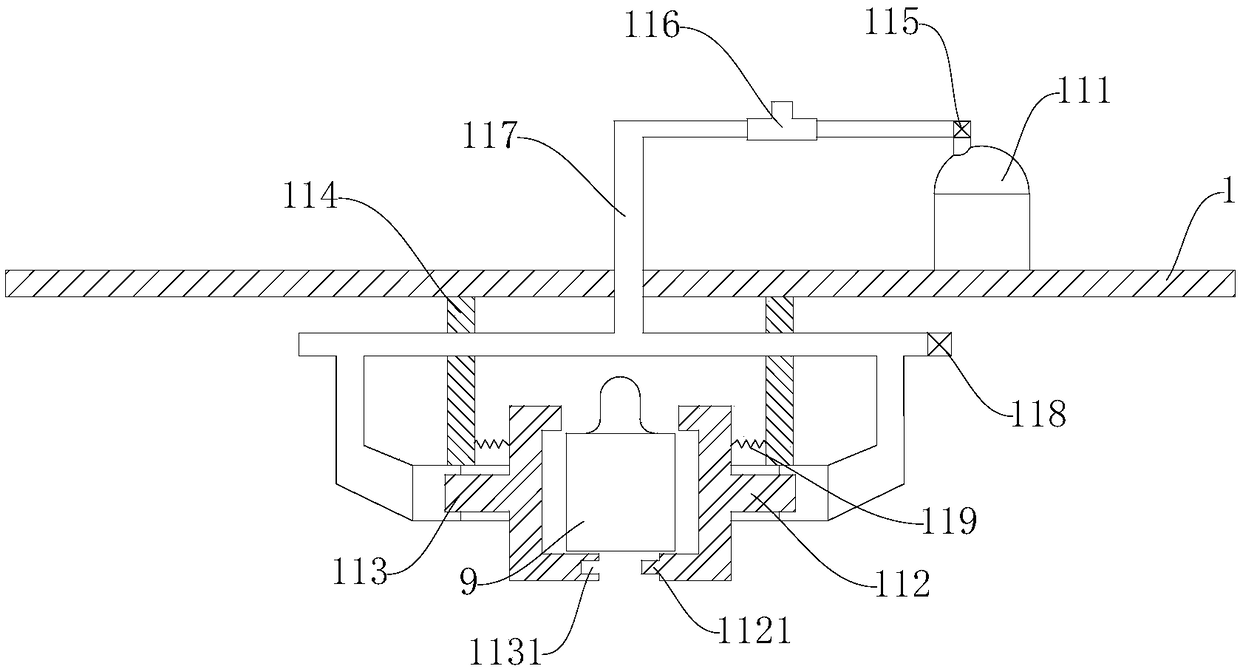
[0020] now attached Figures 1 to 3 A specific embodiment of the present invention is described in detail.
[0021] A balance device for walking a tea garden harvesting robot, comprising a vehicle frame 1, a control box 2, a battery box 3, a motor 4, a driving wheel 5, a driving wheel shaft 6, a walking wheel 7, a walking wheel shaft 8, a rail 9, and a distance detector 10. Emergency braking device 11 and automatic balancing device 12. The control box 2, the battery box 3, the motor 4 and the automatic balancing device 12 are fixedly arranged on the vehicle frame 1, the control box 2 is arranged at the front end of the vehicle frame 1, and a control system for controlling the device is installed inside, and beside the control box 2, there is a Connect with it the battery box 3 that provides power supply, battery box 3 side is provided with the electric motor 4 that is connected with it, the output shaft of electric motor 4 connects driving wheel 5 through belt transmission an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More