

Novel magnetic attraction type wall climbing robot for sand blasting and rust removal of ship
A wall-climbing robot, sand blasting and derusting technology, applied in the direction of ship hull, motor vehicle, ship construction, etc., can solve the problems of insufficient adsorption force for overcoming obstacles, achieve the goal of reducing adsorption force, avoiding wear and tear, and enhancing bending resistance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
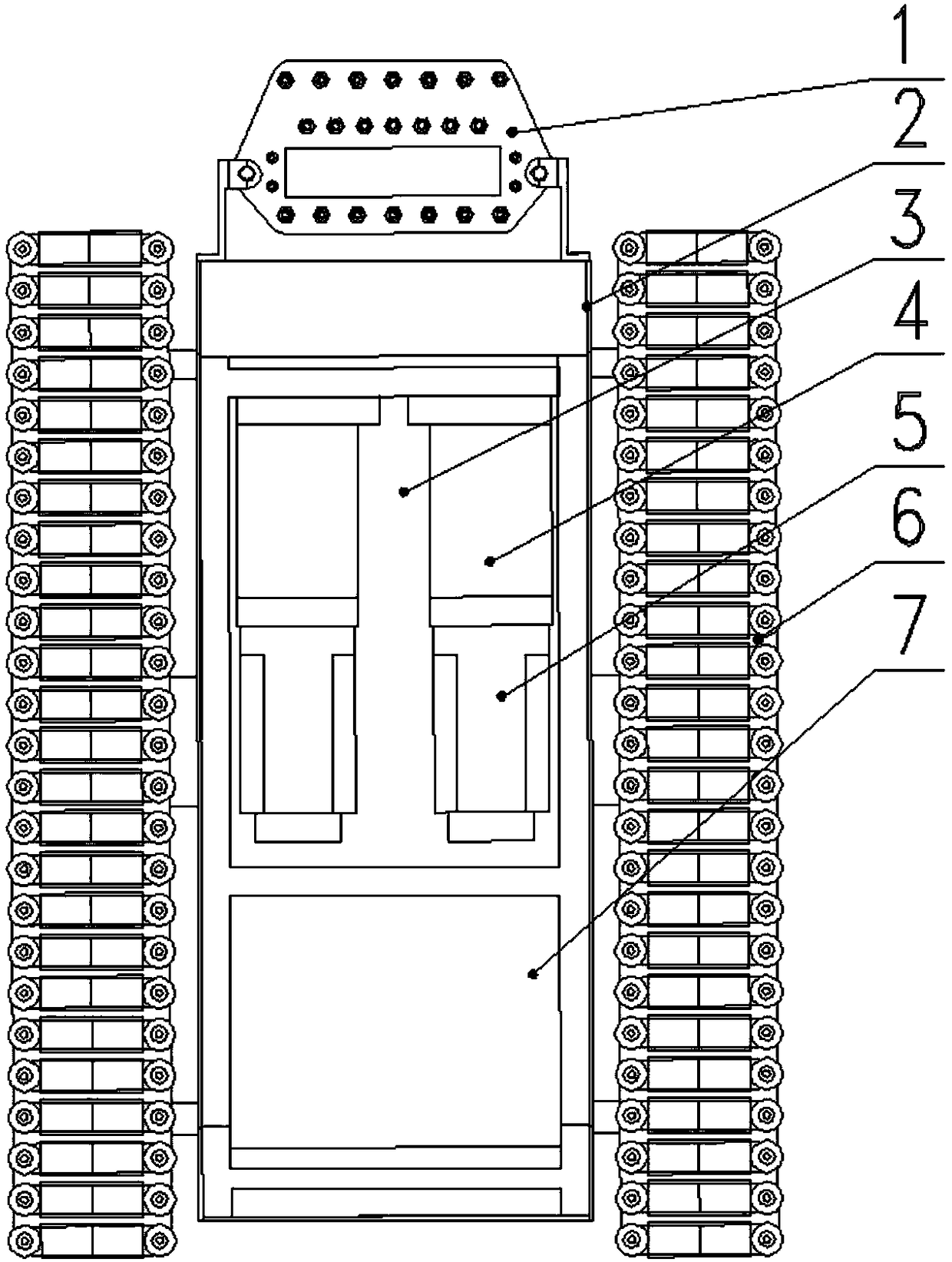
[0018] A novel magnetic adsorption type wall-climbing robot used for sandblasting and rust removal of ships includes a walking system, an auxiliary sucker system, a power system, and a wall-climbing robot frame.
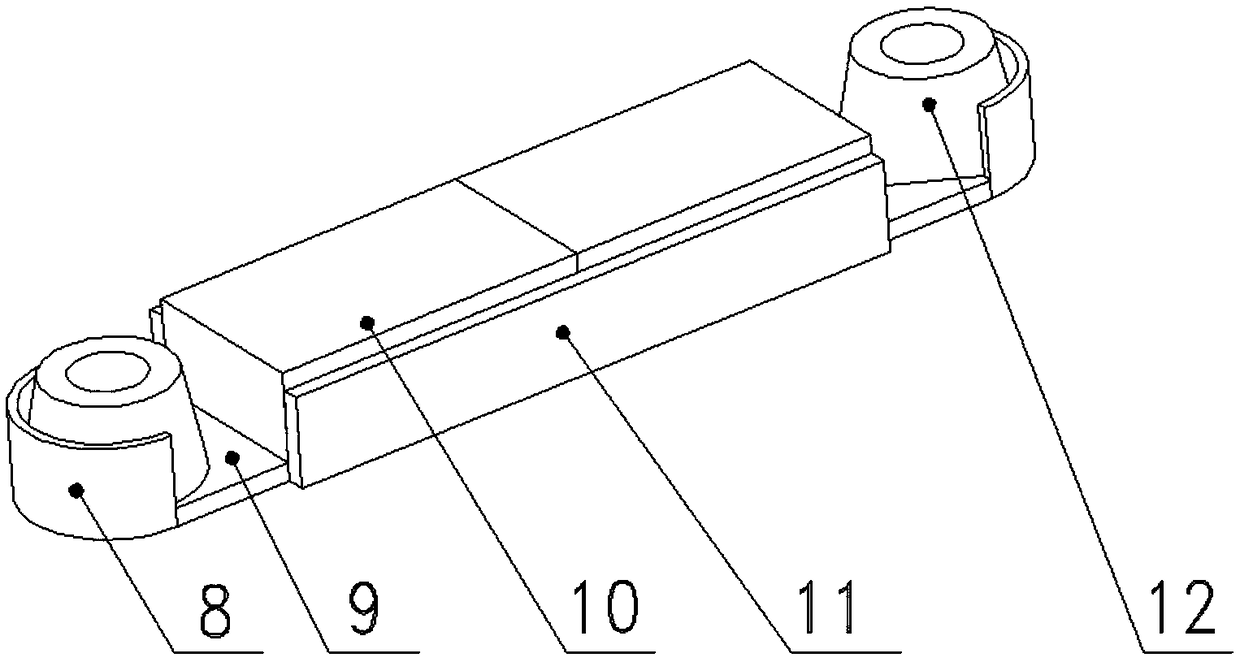
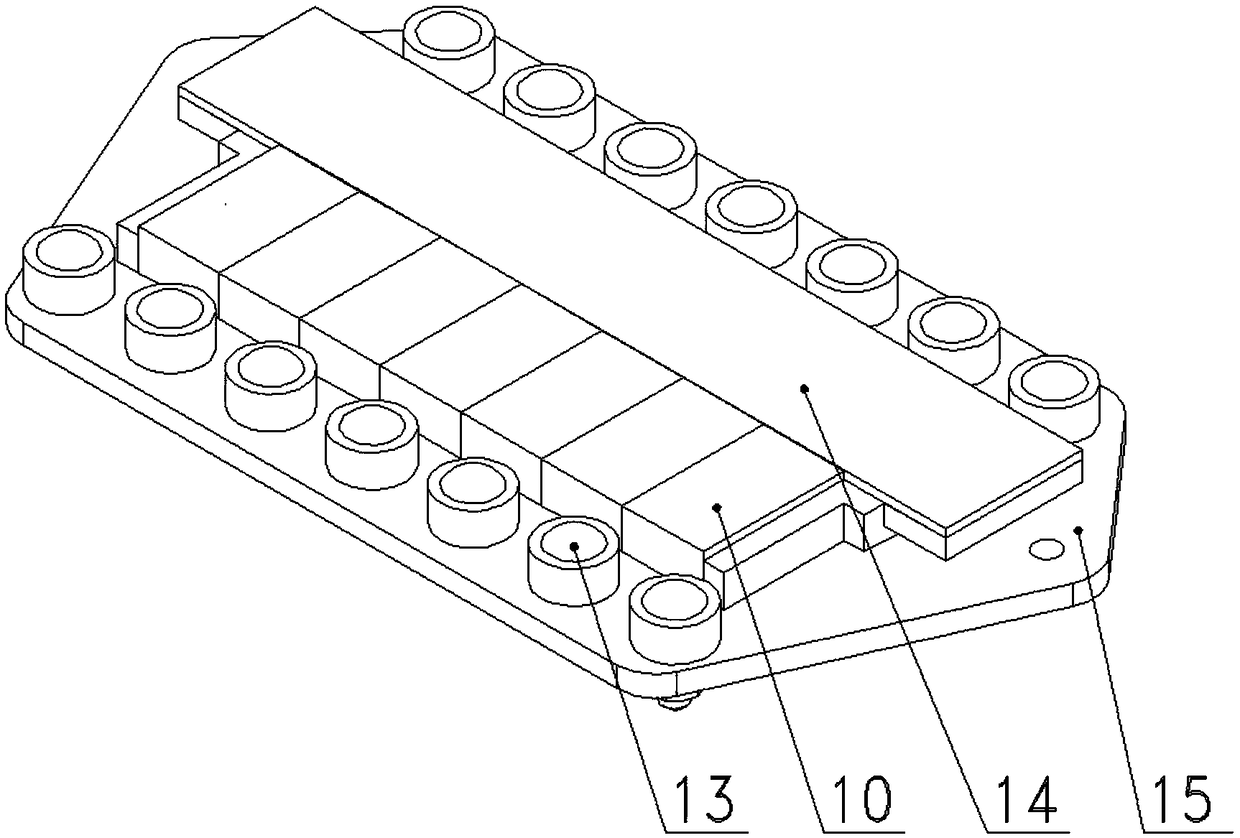
[0019] The walking system includes a crawler mechanism, a rear sprocket 16, a driving sprocket 21, a crawler support frame 17 and a retractable spring shock absorber, and the crawler mechanism includes a crawler belt 6, a magnet mounting plate 9, a ru...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More