

Multi-heterogeneous movable robot control system
A mobile robot, control system technology, applied in control/regulation systems, non-electric variable control, transmission systems, etc., can solve the problems of high software development difficulty, no unified interface, poor compatibility, etc., to improve flexibility and convenience , to improve the utilization of resources, the effect of collaborative control and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
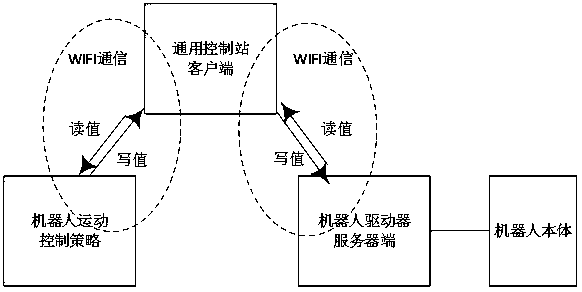
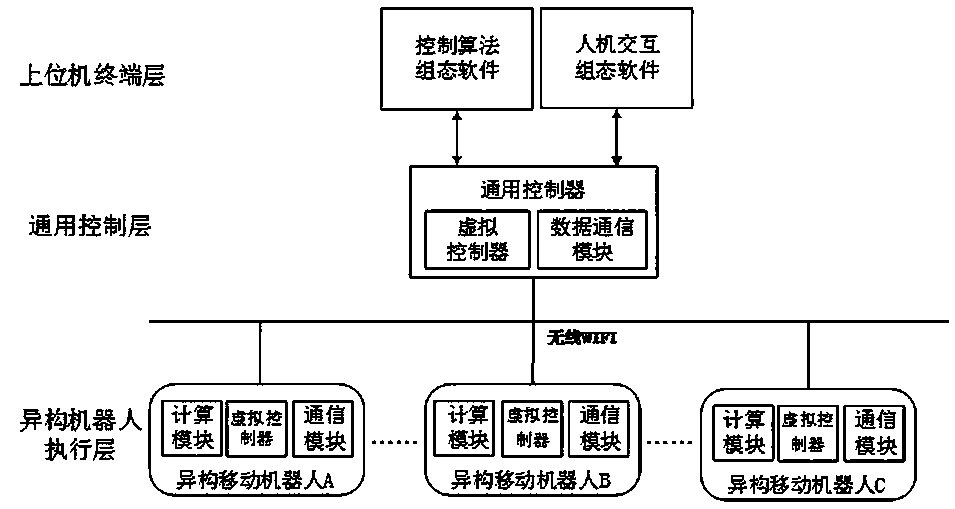
[0020] The invention provides a multi-heterogeneous mobile robot control system, which is composed of three parts: the general control layer of the heterogeneous mobile robot, the execution layer of the heterogeneous equipment, and the terminal layer of the upper computer; the execution layer of the heterogeneous equipment is composed of the heterogeneous mobile robot, The heterogeneous controllers of heterogeneous mobile robots can run the same set of control algorithm configuration programs, and the sharing and synchronization of control data can be realized in real time between different types of heterogeneous mobile robots;
[0021] The general control layer of the heterogeneous mobile robot is composed of a general controller, which is responsible for processing complex task calculations including multi-robot task scheduling, heteroge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More