

Underwater robot propeller modular drive circuit and driving method thereof
A technology for underwater robots and drive circuits, which is applied in the direction of propulsion engine, ship propulsion, propulsion components, etc. It can solve the problems of difficult to locate faulty components, unusable drives, and ineffective use of the arc space of the drive, etc., to achieve improved Enhanced internal space utilization and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
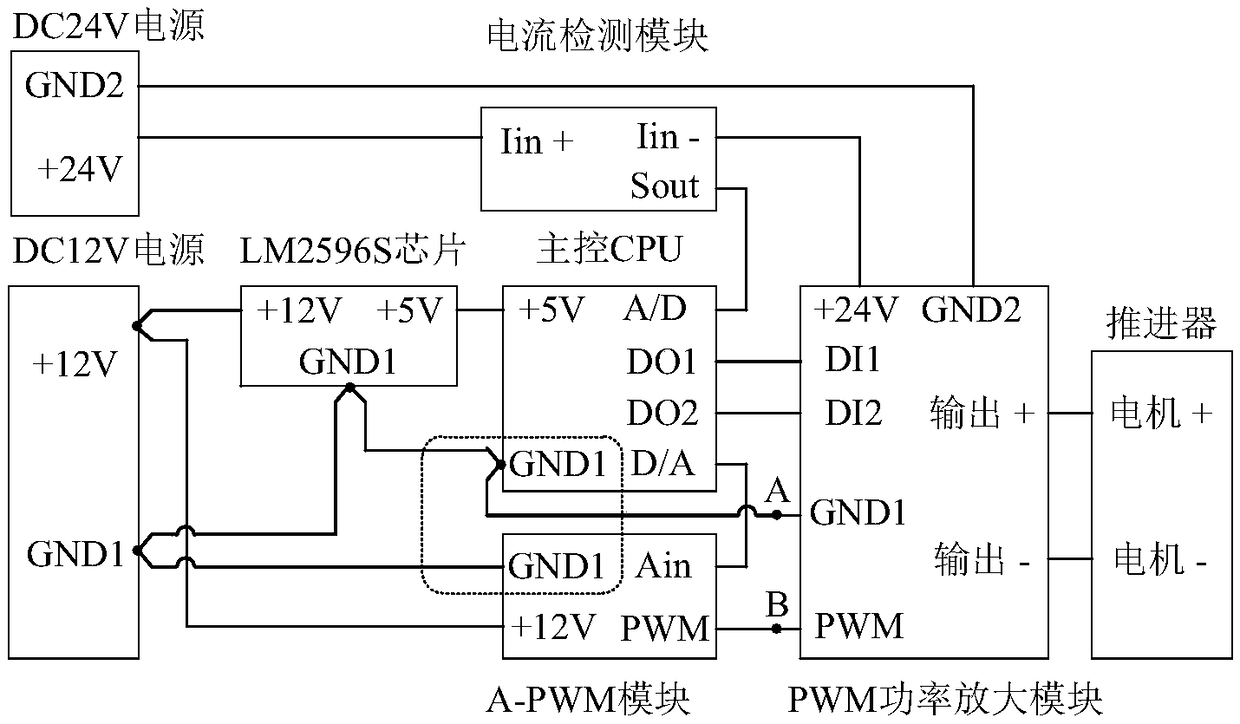
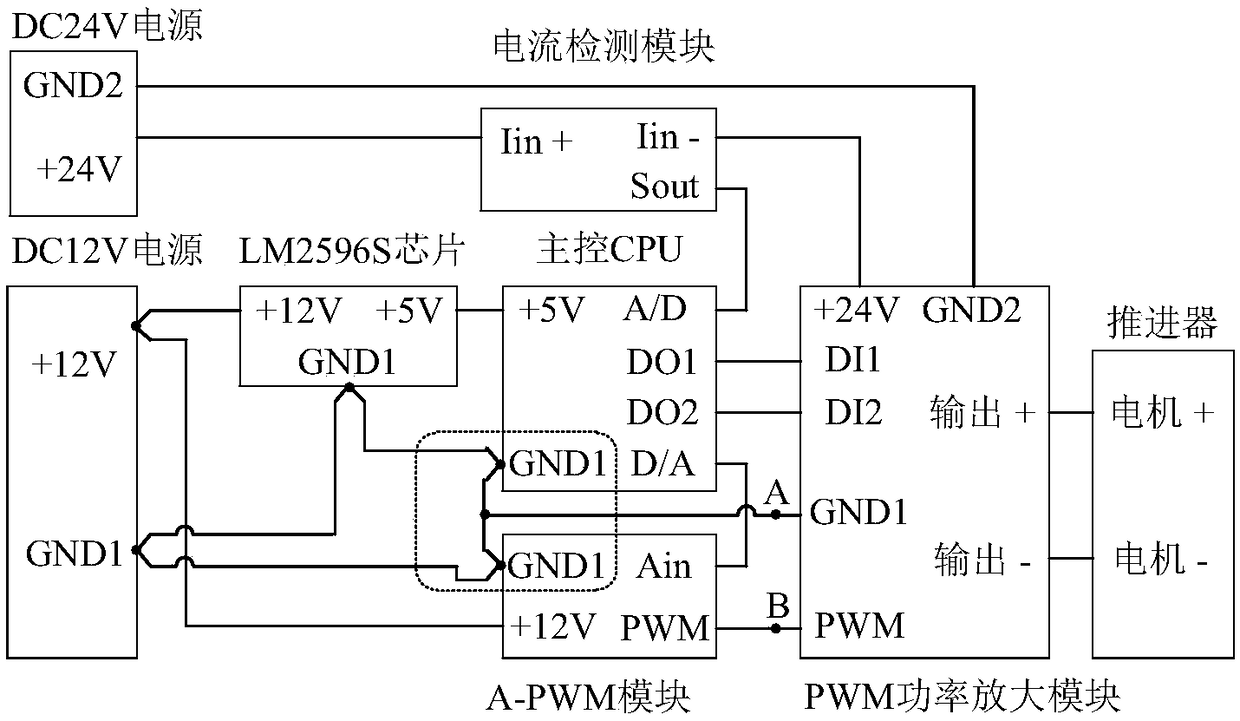
[0044] Such as figure 1 As shown, the DC24V power supply module supplies power to the PWM power amplifier module, thereby indirectly supplying power to the thruster. The current detection module is connected in series between the DC24V power supply module and the PWM power amplifier module to detect the working current of the thruster in real time, and the current detection result is simulated The form of the voltage signal is output to the A / D input port of the main control CPU module through the signal output port Sout.
[0045] Such as figure 1As shown, the DC12V power supply output module outputs DC12V power supply voltage, which is converted into DC5V by the LM2596S chip and then supplies power to the main control CPU module. The main control CPU module is composed of PC104CPU module, A / D board, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More