

Self-feeding type force feedback multidimensional massage robot system
A robot system and force feedback technology, applied in kneading massage appliances, vibration massage, massage auxiliary products, etc., can solve the problems of inflexible operation of mechanical arms, inability to realize self-supporting back massage, poor autonomous control, etc., and achieve improved Maneuverability and comfort, rich massage action, flexible operation and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
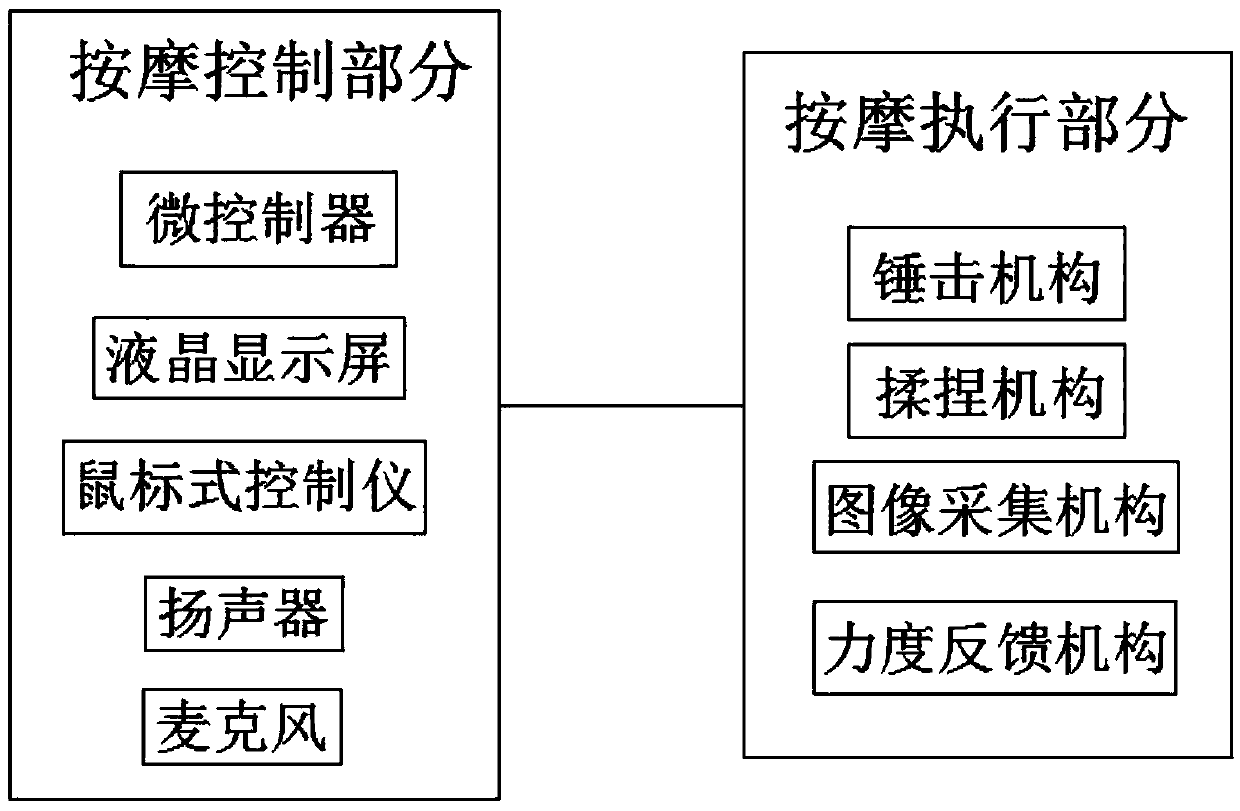
[0028] Such as Figure 1-4 As shown, a self-contained force feedback multi-dimensional massage robot system includes a massage control part 1 and a massage execution part 2. The massage control part 1 is used for human-computer interaction and sends signals to the massage execution part 2. The massage execution part Part 2 can perform massage actions and feed back the collected signals to massage control part 1;
[0029] The massage control part 1 includes a mouse control instrument 11 and a liquid crystal display 12, an operation panel 13 is arranged on the outer surface of the mouse control instrument 11, a microcontroller and a A photoelectric sensor, the microcontroller is electrically connected to the liquid crystal display 12, the operation panel 13 and the photoelectric sensor;
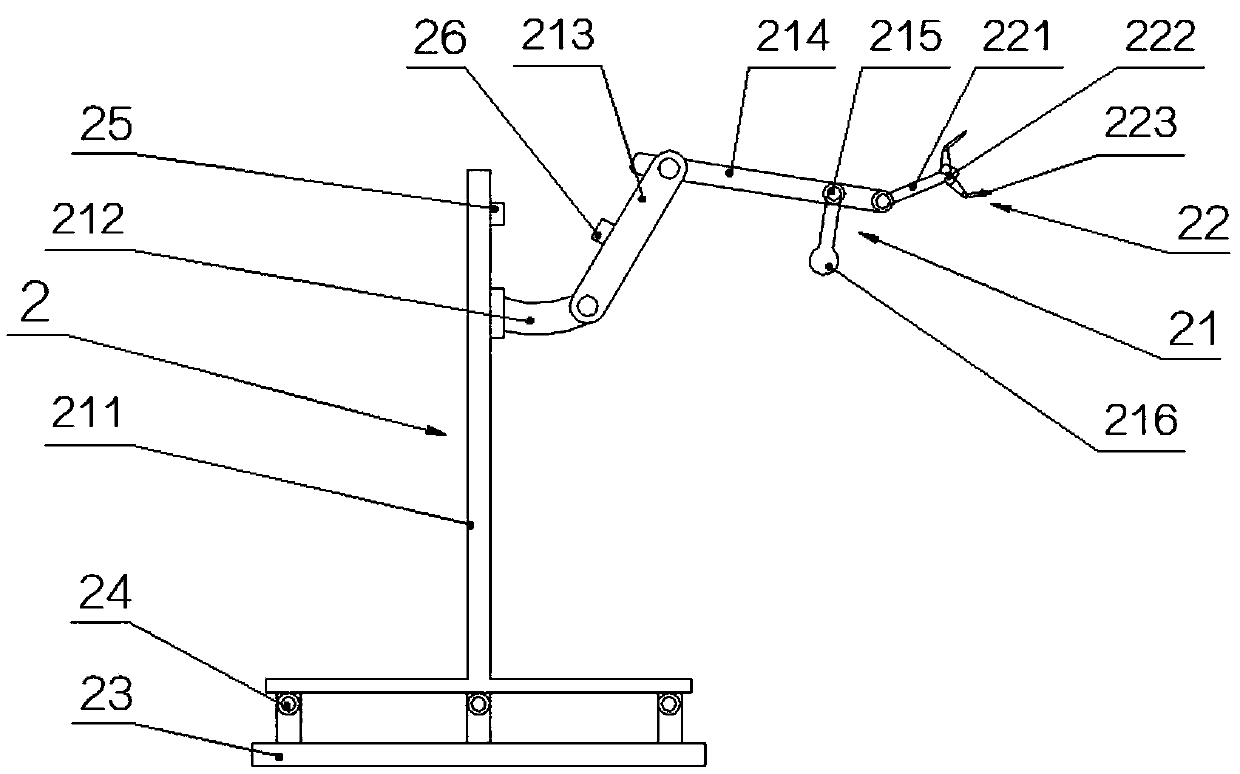
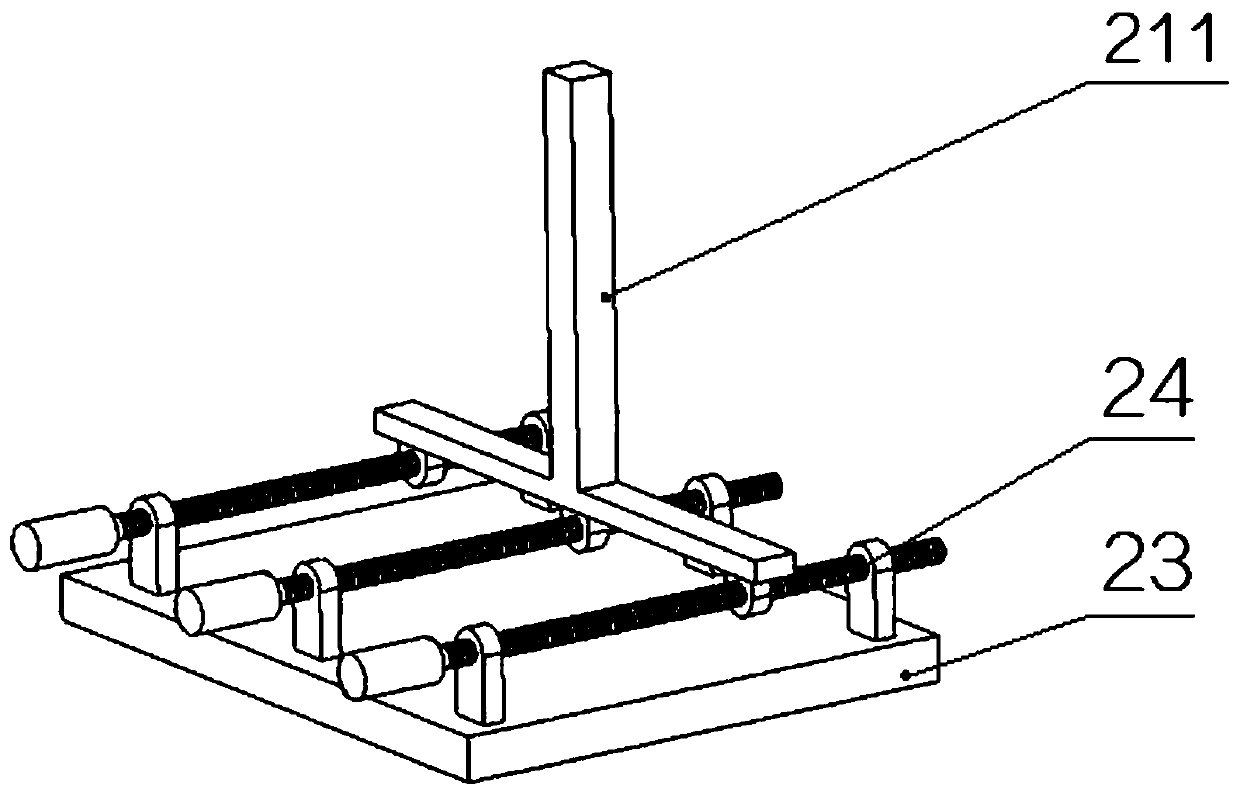
[0030] The massage execution part 2 includes a hammer mechanism 21...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More