

Cleaning robot drop control method and chip based on virtual boundary
A technology for cleaning robots and control methods, applied in the field of drop control methods and chips for cleaning robots based on virtual boundaries, which can solve problems such as damage to the fuselage, misjudgment of movement, and large braking distances, so as to improve the ability to prevent falls and improve accuracy , the effect of reducing the degree of damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
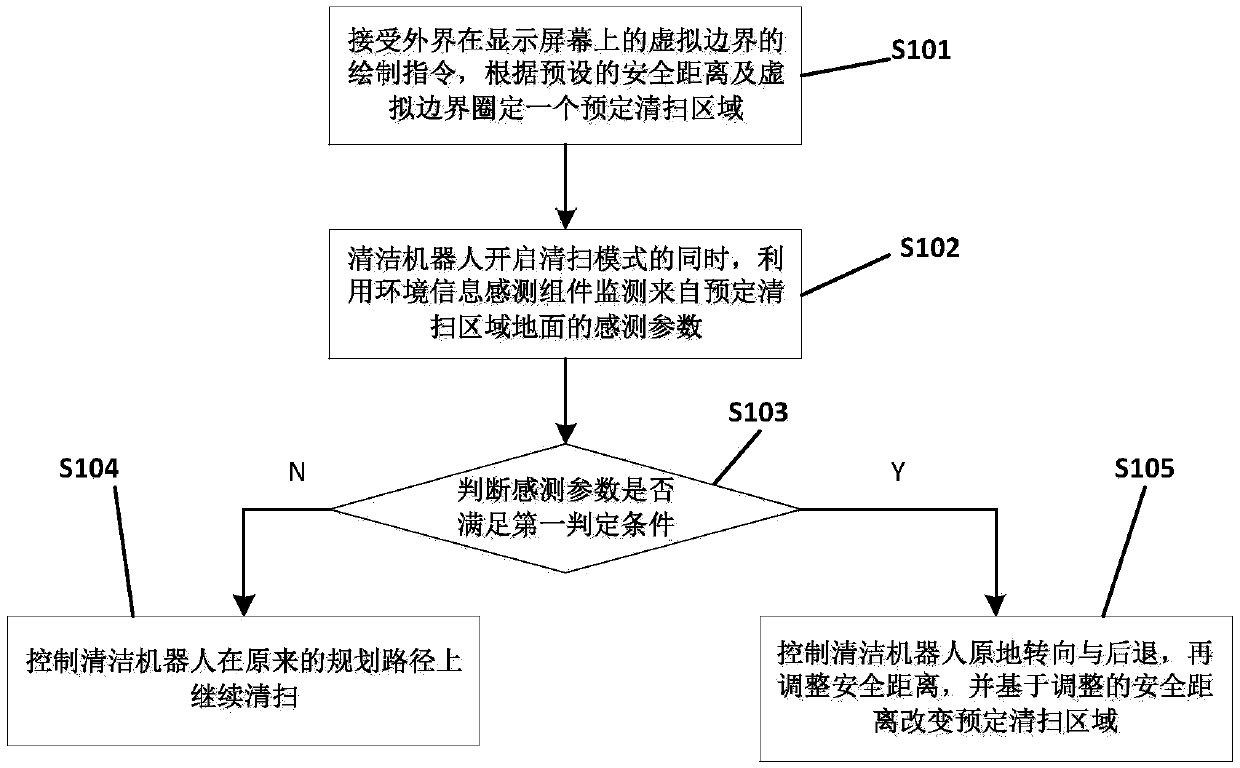
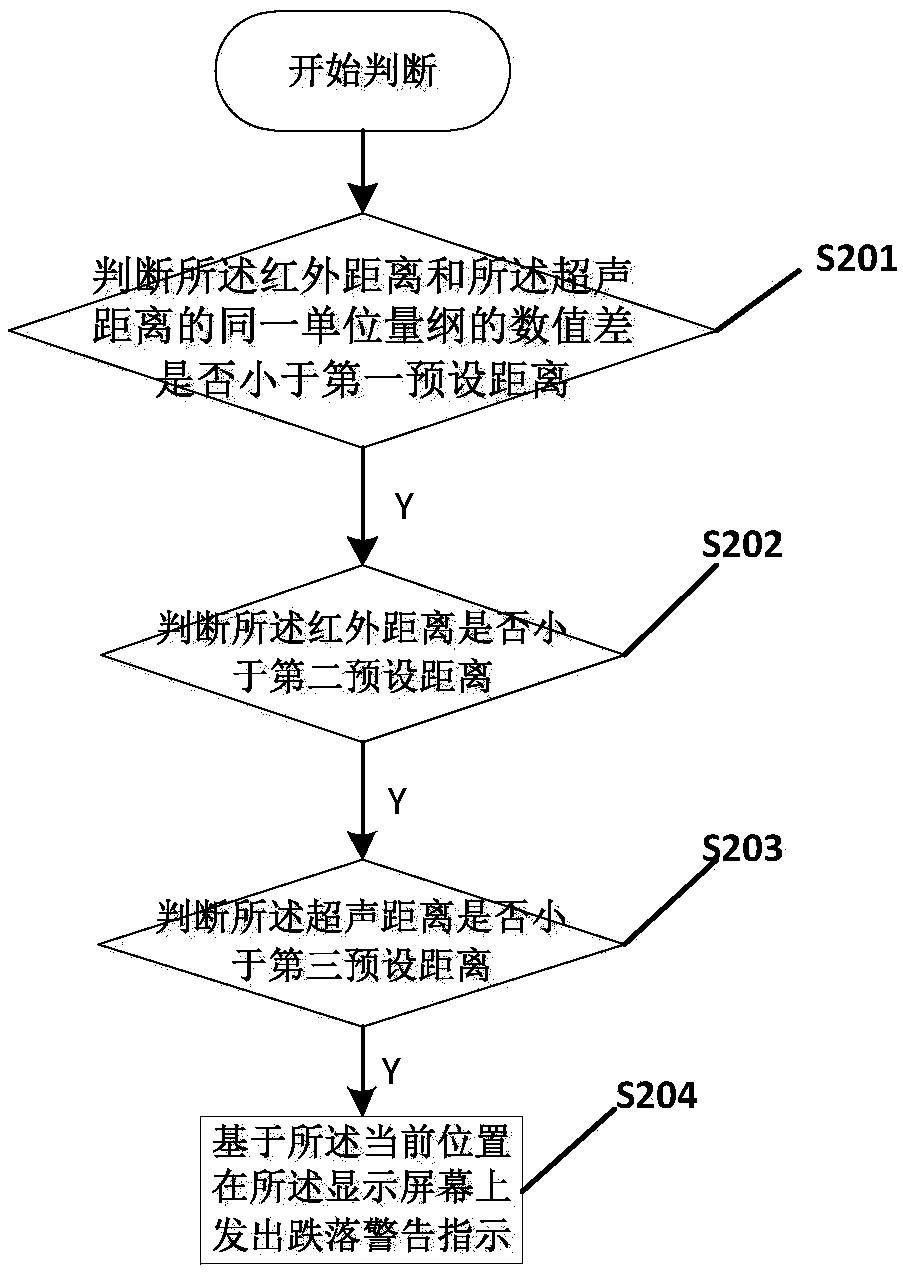
[0031] Embodiment 1 provides a method for judging that the sensing parameters of the cleaning robot at the current position satisfy the first judging condition, such as figure 2 As shown, it includes: judging from the beginning and entering step S201; step S201, judging whether the numerical difference of the same unit dimension between the infrared distance and the ultrasonic distance is less than the first preset distance, and if so, proceeding to step S202. In step S201, setting different types of sensors can prevent the occurrence of false detection by a single sensor, thereby improving the stability of the anti-drop detection of the whole system.
[0032] Step S202, judging whether the infrared distance is less than a second preset distance, if yes, proceed to step S203. The second preset distance is based on the infrared sensor's prediction of whether the cleaning robot falls within the falling distance range.
[0033] Step S203, judging whether the ultrasonic distance...
Embodiment 2
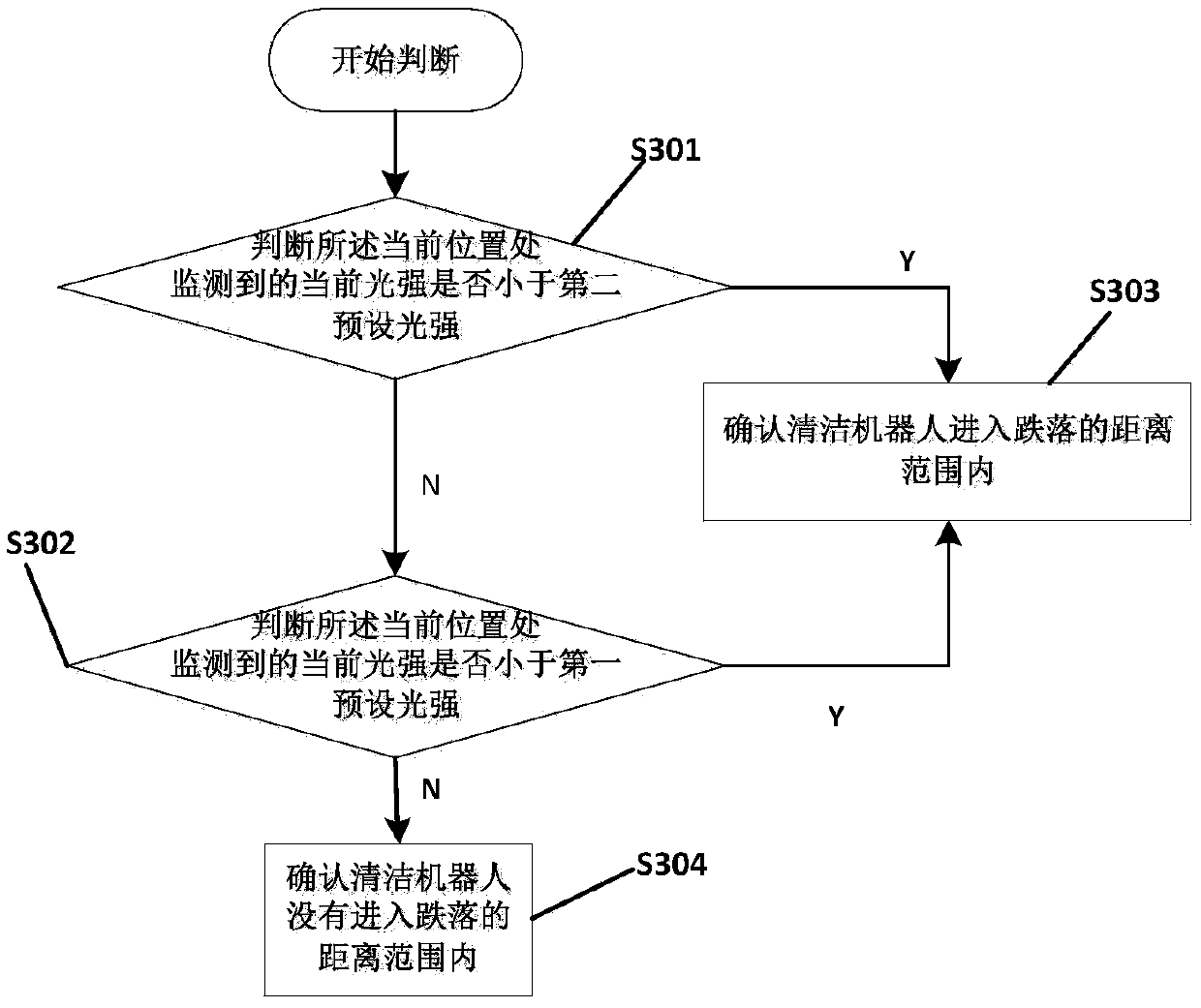
[0036] In the second embodiment, the cleaning robot is provided with a downward-looking sensor and an edge sensor, and a detection sensor (hereinafter also referred to as a sensor for short) refers to a downward-looking sensor, that is, a sensor that monitors the walking surface of the cleaning robot. Detection sensor parameters (hereinafter also referred to as sensor parameters) refer to the parameters corresponding to the minimum light intensity. If the light intensity is less than or equal to the predetermined minimum light intensity, it is considered that a deep pit that may pose a threat to the cleaning robot is encountered in the front, and the main control unit of the robot sends a direction-changing command to the drive universal wheel, so that the cleaning robot stays in place. Turn, for example, back and forth, then change direction. The value corresponding to the minimum light intensity is set as a sensor parameter, and changing the sensor parameter means changing t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More