Position Tracking Control Method of Permanent Magnet Synchronous Motor Based on Normalized Projection Operator
A technology of permanent magnet synchronous motor and projection operator, which is applied in the direction of electronically commutated motor control, motor control, motor generator control, etc., can solve the problem that the load change does not have adaptive ability, the convergence speed performance is limited, and the steady-state error boundary Small problems, to achieve high-performance position tracking control, improve the effect of convergence efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] In order to more clearly illustrate the embodiments of the present invention and the technical solutions in the prior art, the specific implementation manners of the present invention will be described below with reference to the accompanying drawings. Obviously, the accompanying drawings in the following description are only some embodiments of the present invention, and those skilled in the art can also obtain other accompanying drawings based on these drawings and obtain For other embodiments, the present invention is not limited to this example.
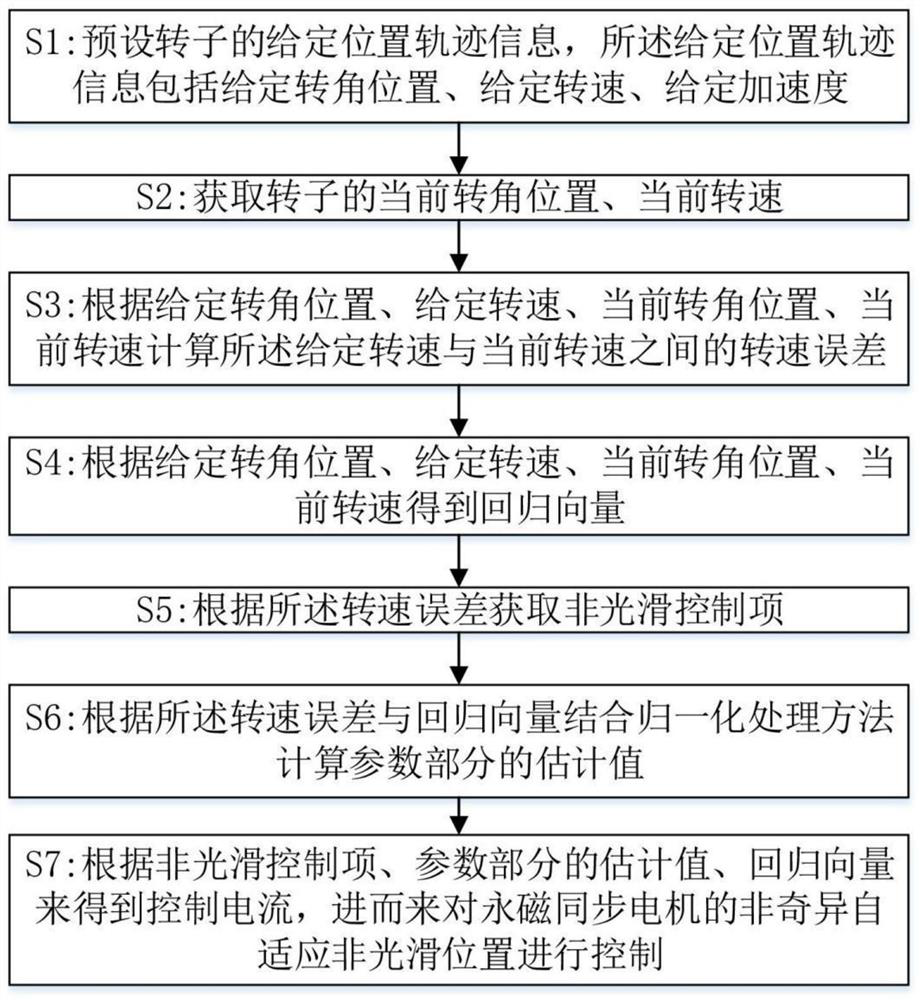
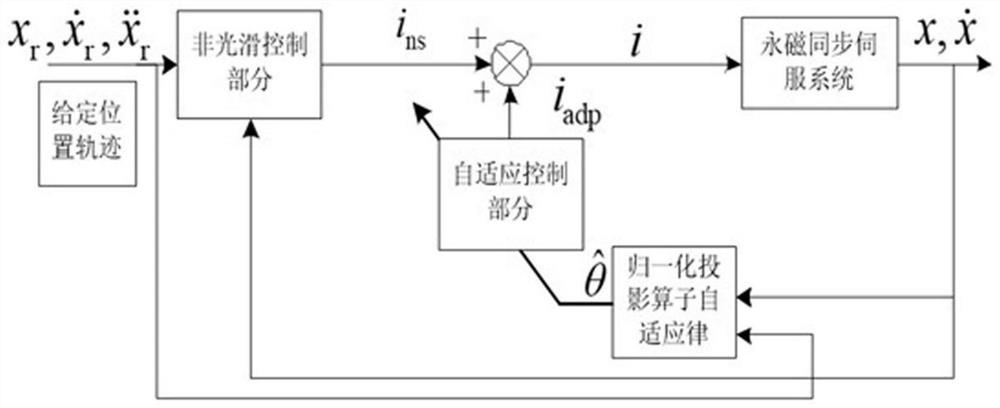
[0036] Such as figure 1 and figure 2 As shown, embodiments of the invention include:
[0037] S1, preset the given position track information of the rotor, the given position track information includes a given rotational angle position, a given rotational speed, and a given acceleration.
[0038] S2, obtaining the current rotational angle position and the current rotational speed of the rotor.
[0039] The present inv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



