

A road boundary detection and tracking method based on a three-dimensional laser radar
A three-dimensional laser and boundary detection technology, applied in the field of environment perception of unmanned vehicles, can solve the problems of small field of view, low price, and no depth information of monocular cameras, etc., and achieve good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
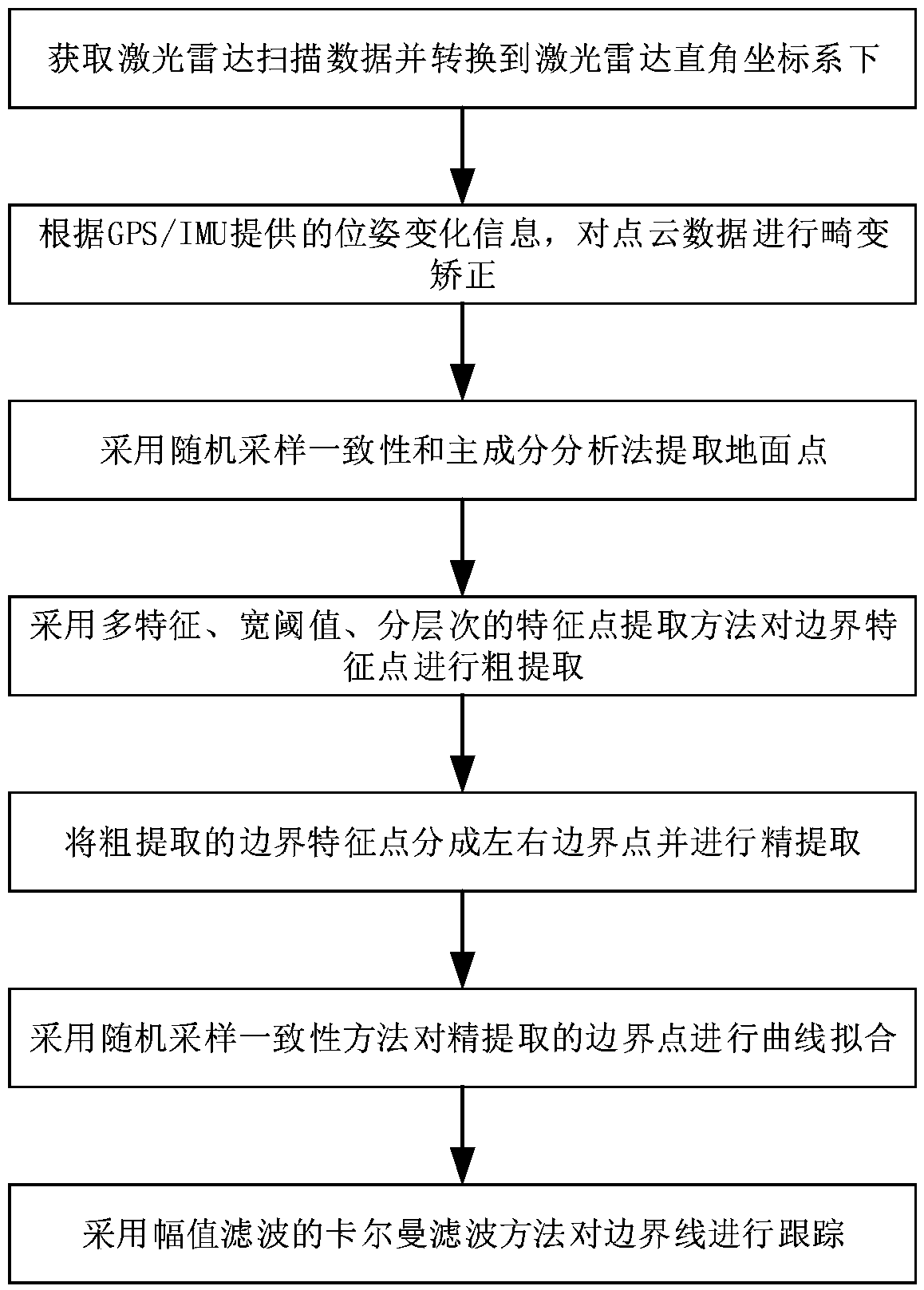
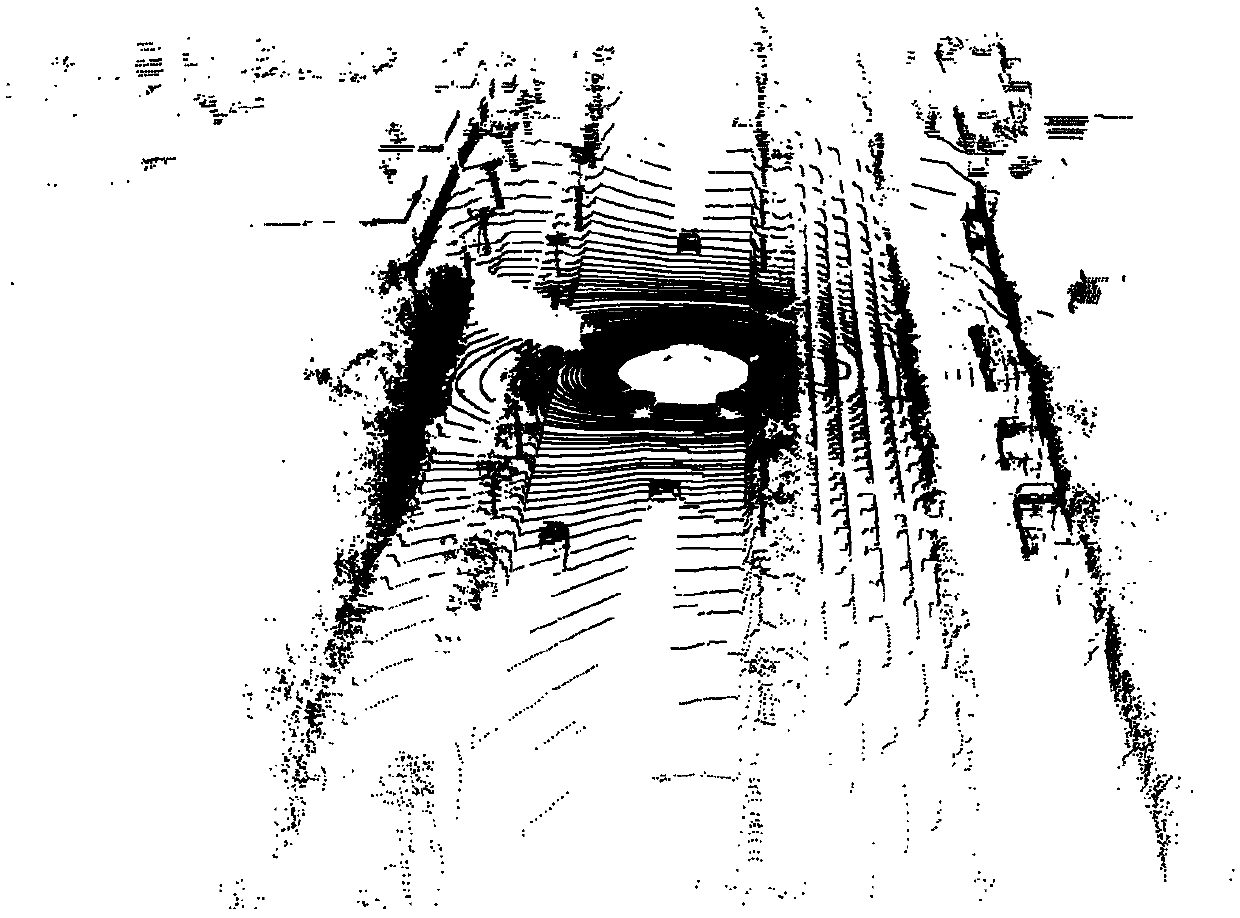
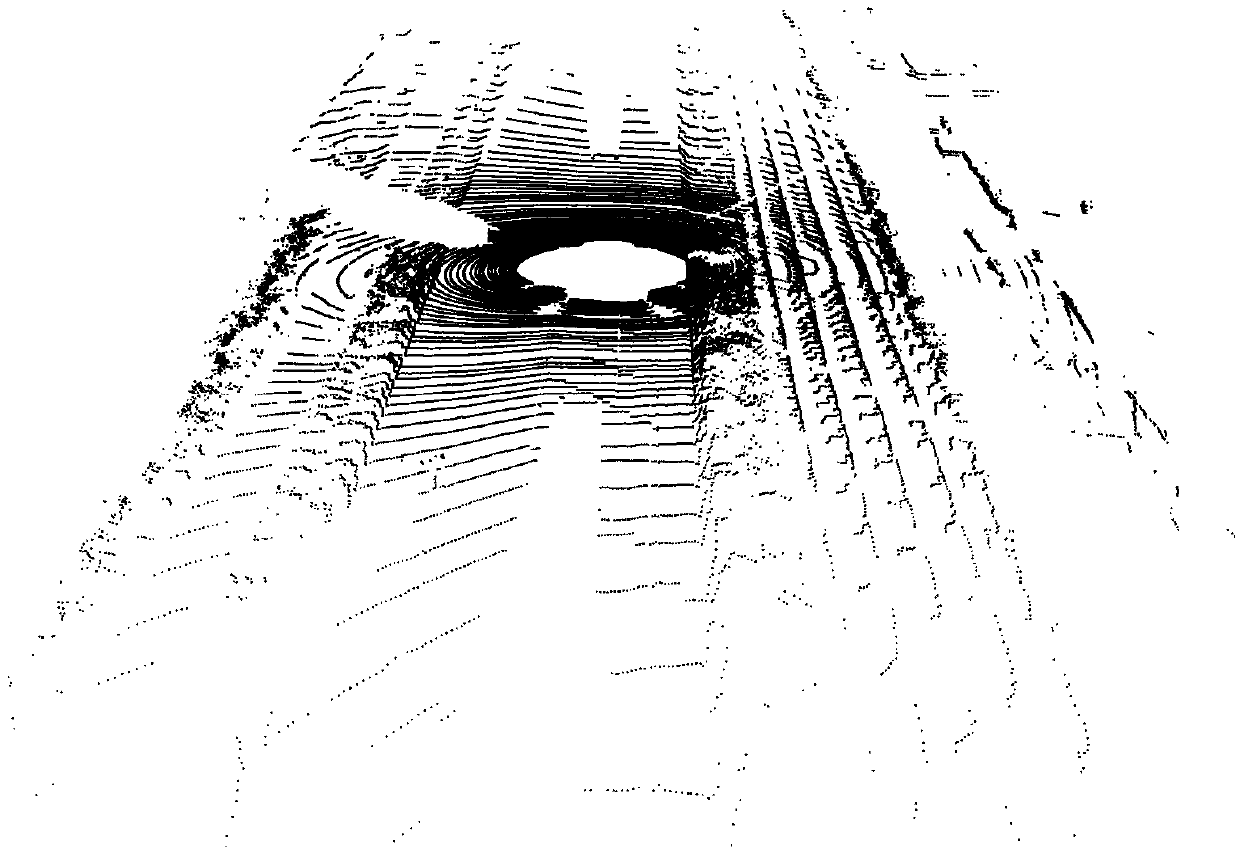
[0117] This embodiment provides a road boundary detection method based on lidar scanning, which can be used to detect road boundaries under various road conditions. This embodiment is not limited to a certain type of laser radar. In order to describe this method in detail, we take the three-dimensional laser radar Velodyne HDL-64E as an example to analyze this method. The sensor is composed of 64 laser emitting units, divided into upper and lower layers, each with 32 emitting units, the vertical viewing angle is -24.8°-+2°, the vertical resolution is 0.4°, the horizontal field of view is 360°, and the horizontal resolution It is 0.09°, rotates horizontally at a frequency of 10HZ, and generates more than 1 million points per second. The data collected by the radar for one revolution is regarded as a frame, and the output data of the radar is expressed in spherical coordinates. The parameters of each point include the vertical azimuth angle α, the horizontal azimuth angle β, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More