

A Pose Estimation Method for Exhaust Gas LiDAR
A lidar and attitude estimation technology, applied in the field of signal processing, can solve the problems of not taking into account changes in the reliability of accelerometers, performance degradation, etc., to achieve strong stability and robustness, and reduce energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
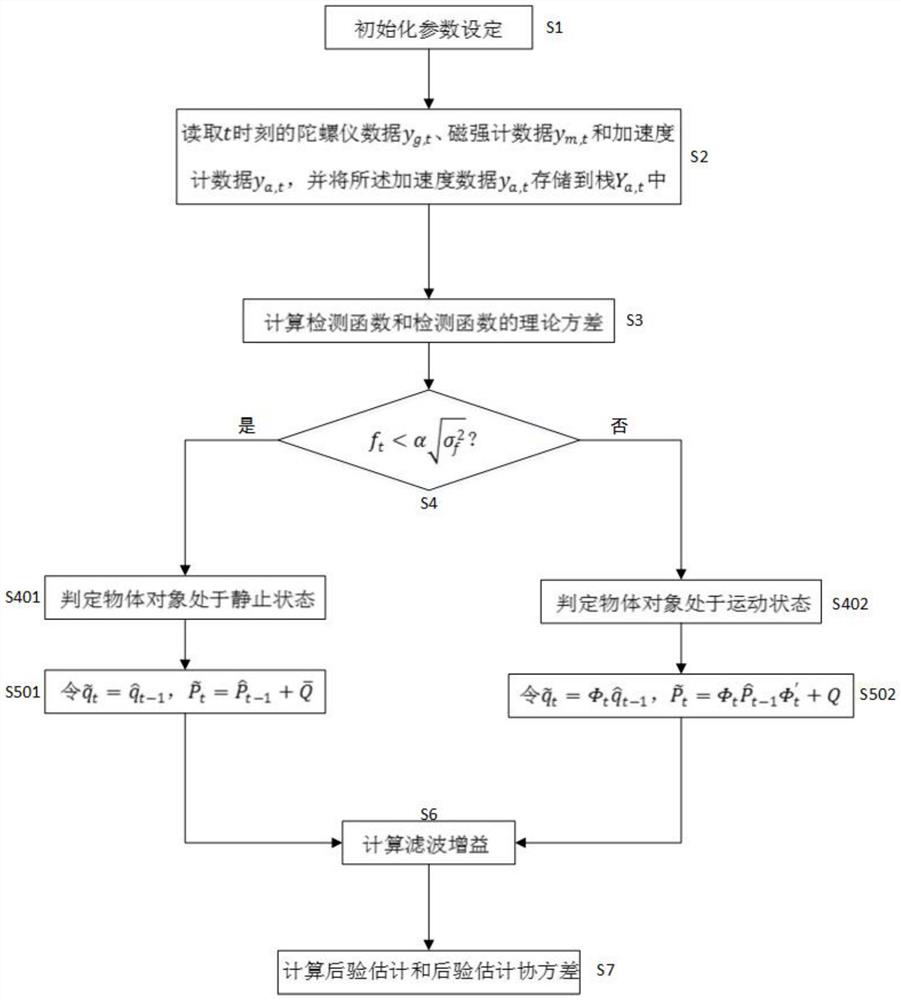
[0057] The present invention provides a method for attitude estimation, including preprocessing defined as follows:
[0058] A quaternion is defined as
[0059] q=[q 0 ,q 1 ,q 2 ,q 3 ]
[0060] If you add any subscripts and subscripts to q, such as superscript x and subscript y, then we have
[0061]
[0062] We also define
[0063] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More