

A slant vehicle detection and tracking system and method based on machine vision
A vehicle detection and machine vision technology, which is applied to instruments, computer parts, image data processing, etc., can solve the problems of great influence of light, low detection accuracy, and real-time performance that cannot meet the requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0150] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
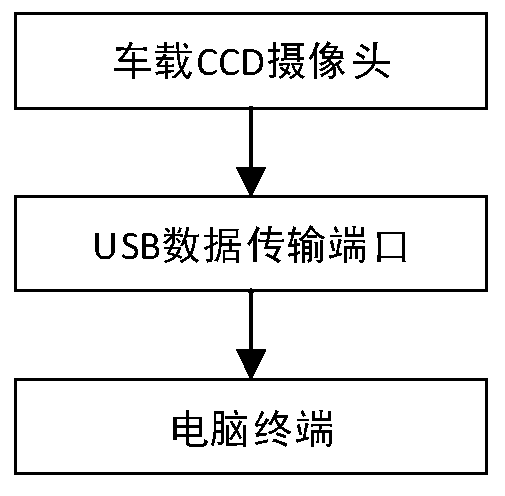
[0151] The technical solution of the system in the embodiment of the present invention is a machine vision-based oblique vehicle detection and tracking system, including: a CCD camera, a USB data transmission port and a computer terminal; the CCD camera, a USB data transmission port and a computer terminal connected in series through wires;
[0152] The CCD camera is used to collect images in real time, and the USB data transmission port is used to transmit real-time collected images to the computer terminal, and the computer terminal is used for vehicle dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More