3C product shell transition area machining path self-adaptive planning method
A processing path and self-adaptive technology, applied in program control, instrument, computer control, etc., can solve problems such as low measurement efficiency, inconsistent chamfer width, and deformation of shell blank processing and clamping, so as to improve measurement efficiency and calculation amount. Small, the effect of improving measurement efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the present invention, not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
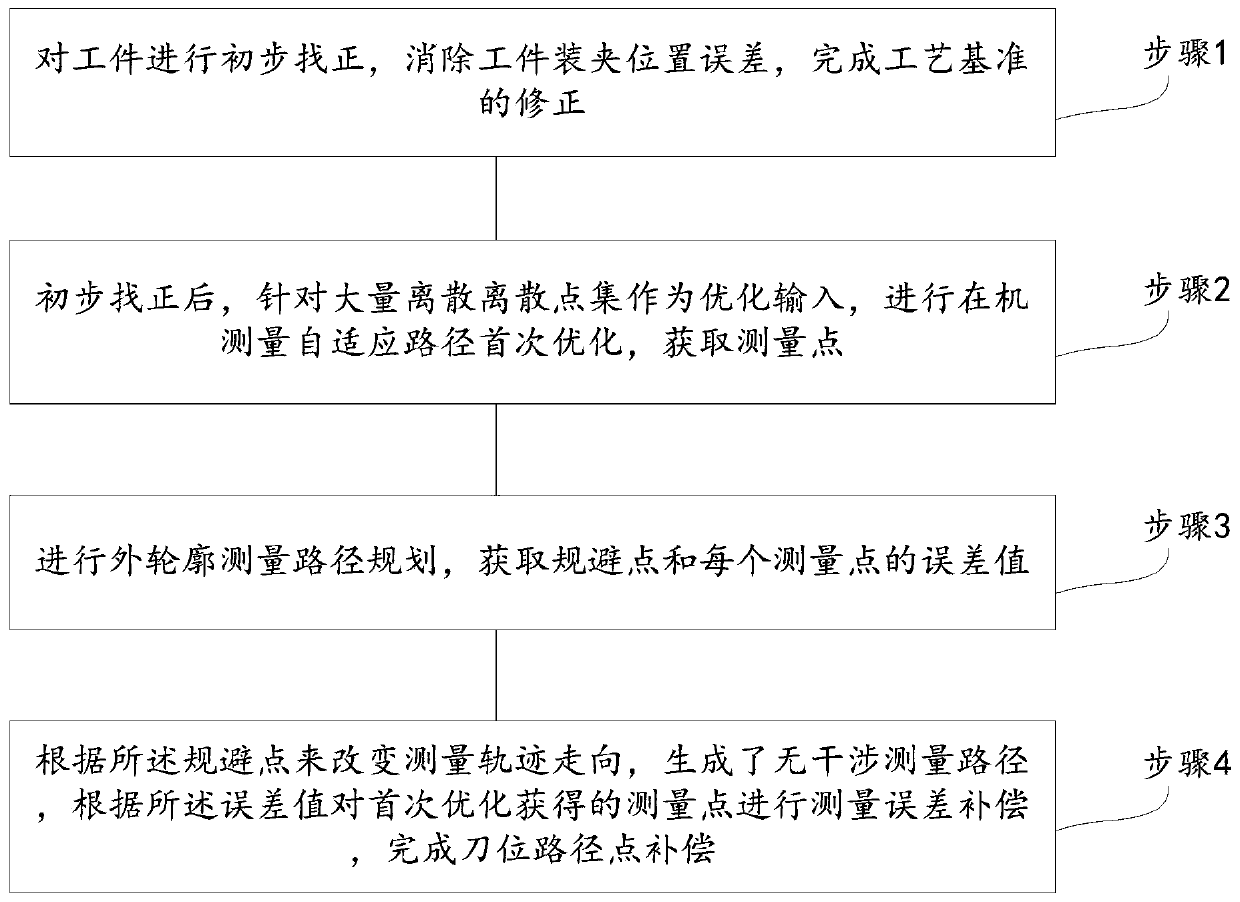
[0048] Such as figure 1 As shown in the present invention, a method for adaptive planning of the processing path of the transition zone of the 3C product shell, comprising the following steps:
[0049] Step 1. Preliminarily align the workpiece, eliminate the error in the clamping position of the workpiece, and complete the correction of the process benchmark;
[0050] Step 2. After preliminary alignment, a large number of discrete point sets are used as opti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More