Backstepping step based double-mechanical arm force/position fuzzy mixing control method
A hybrid control, dual-machine technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
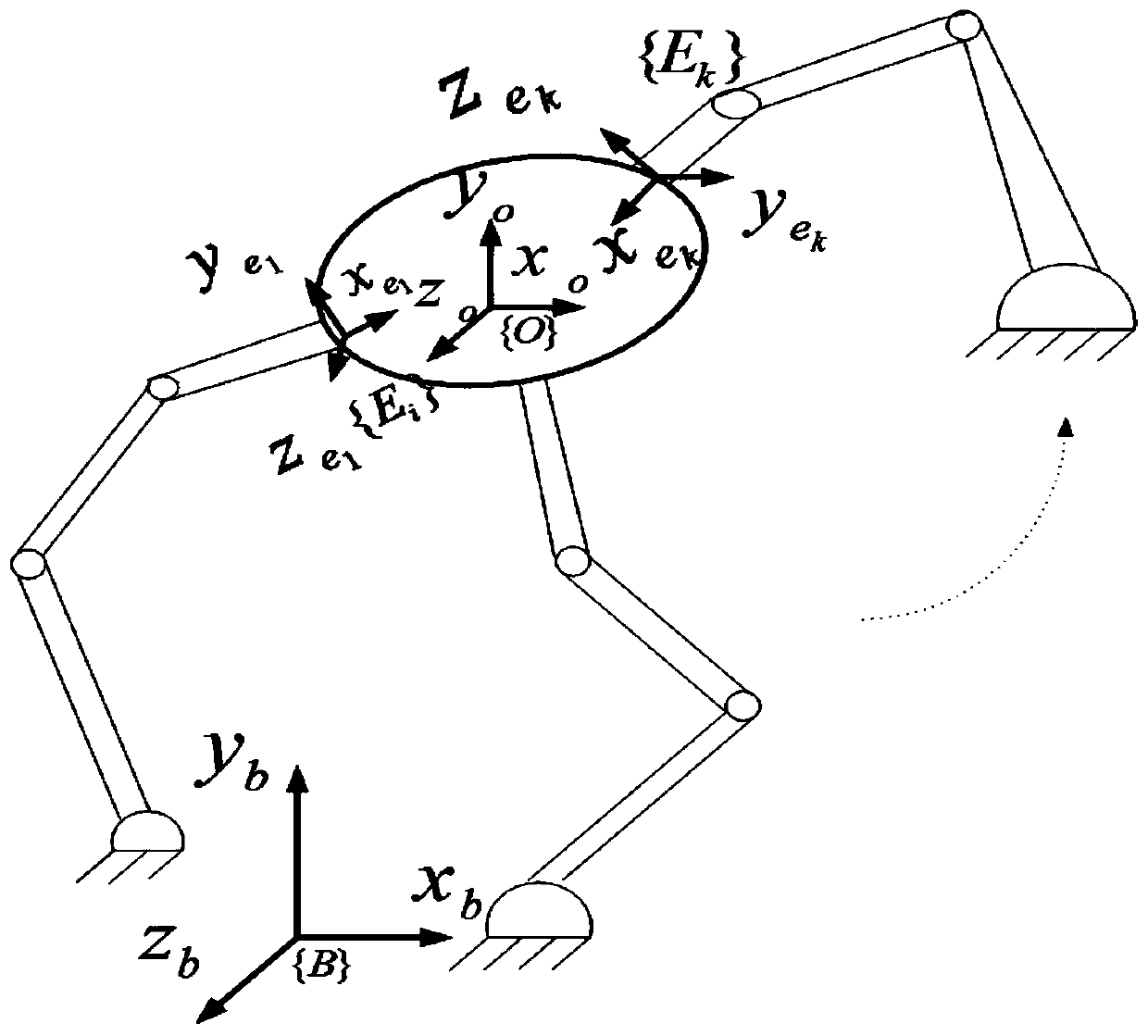
[0121] The basic idea of the present invention is: utilize fuzzy logic system to approach unknown nonlinear function in multi-robot system, meanwhile, based on Lyapunov function, use backstepping method to construct intermediate virtual control signal, obtain control law step by step recursively, thereby control multi-robot system The end effector of the robotic arm is constrained to ensure that the end effector of the robotic arm can accurately track the ideal trajectory of the target object, and the internal force on the target object is negligible.
[0122] Among them, the adaptive backstepping method has been widely valued and applied because it can effectively overcome the influence of time-varying parameters and load disturbance on system performance. Backstepping is a method of controlling uncertain, nonlinear systems, especially those that do not satisfy a given condition. The biggest advantage of the backstepping method is that the original high-order system can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com