

Apparatus comprising a support system for a user and its operation in a gravity-assist mode
A technology that supports systems and devices, used in the fields of motion control and medical engineering, to solve problems such as hindering the execution of gait
Inactive Publication Date: 2019-06-04
ECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE (EPFL)
View PDF5 Cites 9 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Third, vertically restricted trunk support creates undesirable anterior-posterior and lateral forces that impede gait performance (17,18)
Testing robotic systems in quadruped models raises further questions
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
experiment approach 1
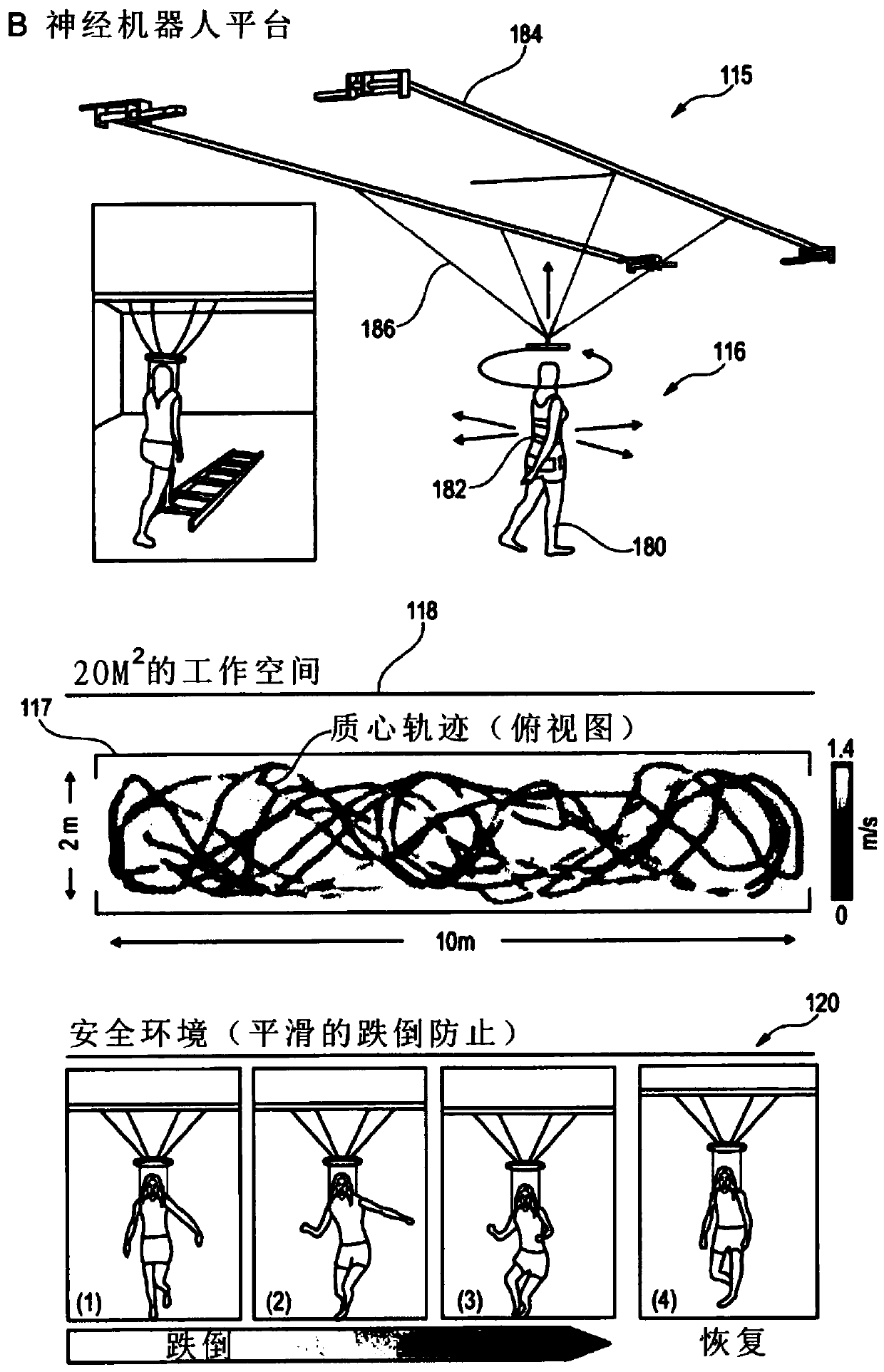
[0357] Experimental protocol 1: Validation of the properties of the neurorobotic platform during locomotion along straight and curved paths in 8 healthy individuals.
experiment approach 2
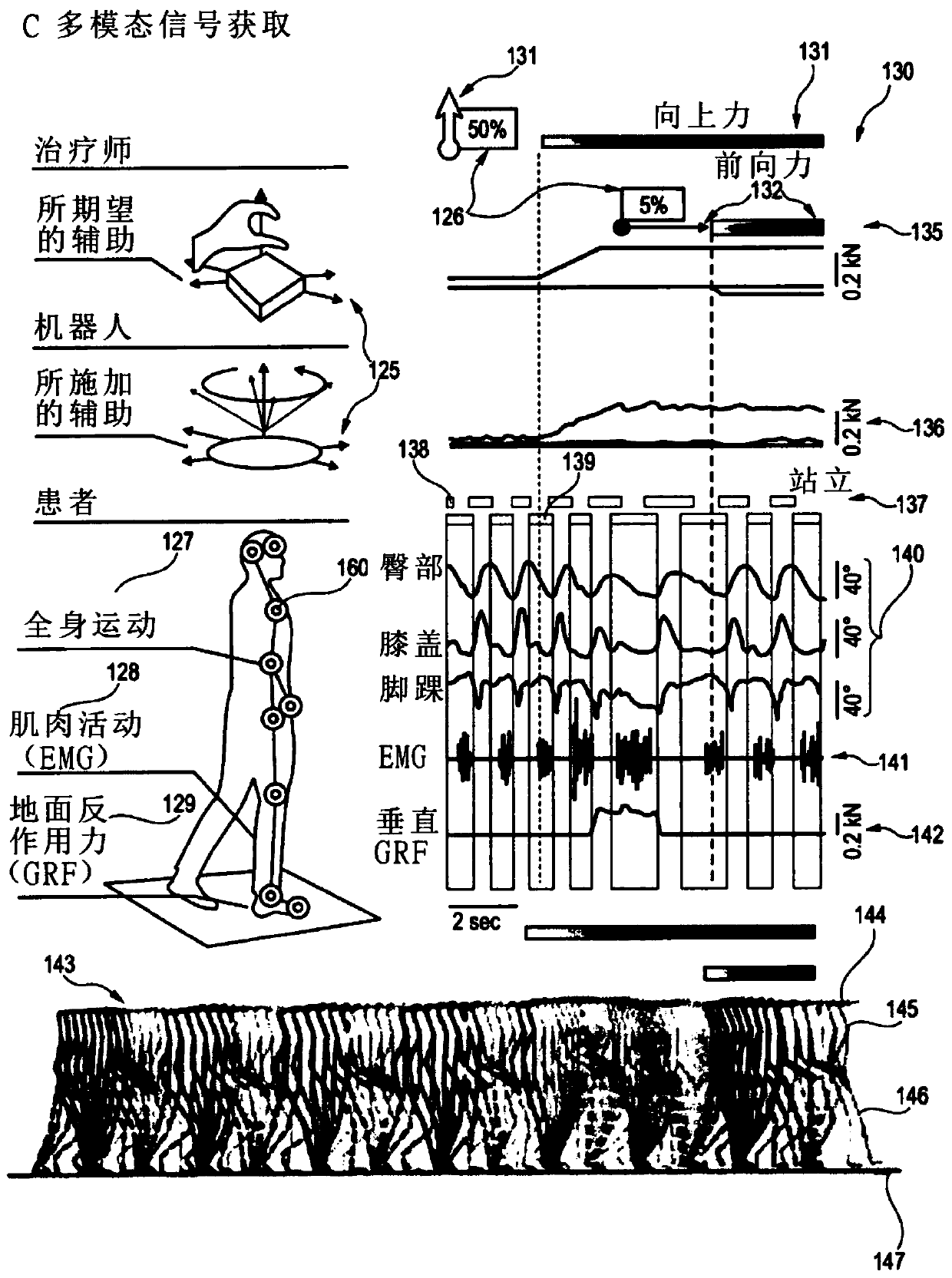
[0358] Experimental Protocol 2: Characterization of the effect of upward and forward forces applied to the trunk on kinematics, dynamics, and muscle activity while standing at rest and in motion. These evaluations were performed in a group of 5 healthy individuals.
experiment approach 3
[0359] Experimental protocol 3: To develop an algorithm that automatically adjusts upward force to meet user-specific needs, experimental recordings were performed during static standing and locomotion of a wide range of upward force in a total of 9 subjects with SCI or stroke.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
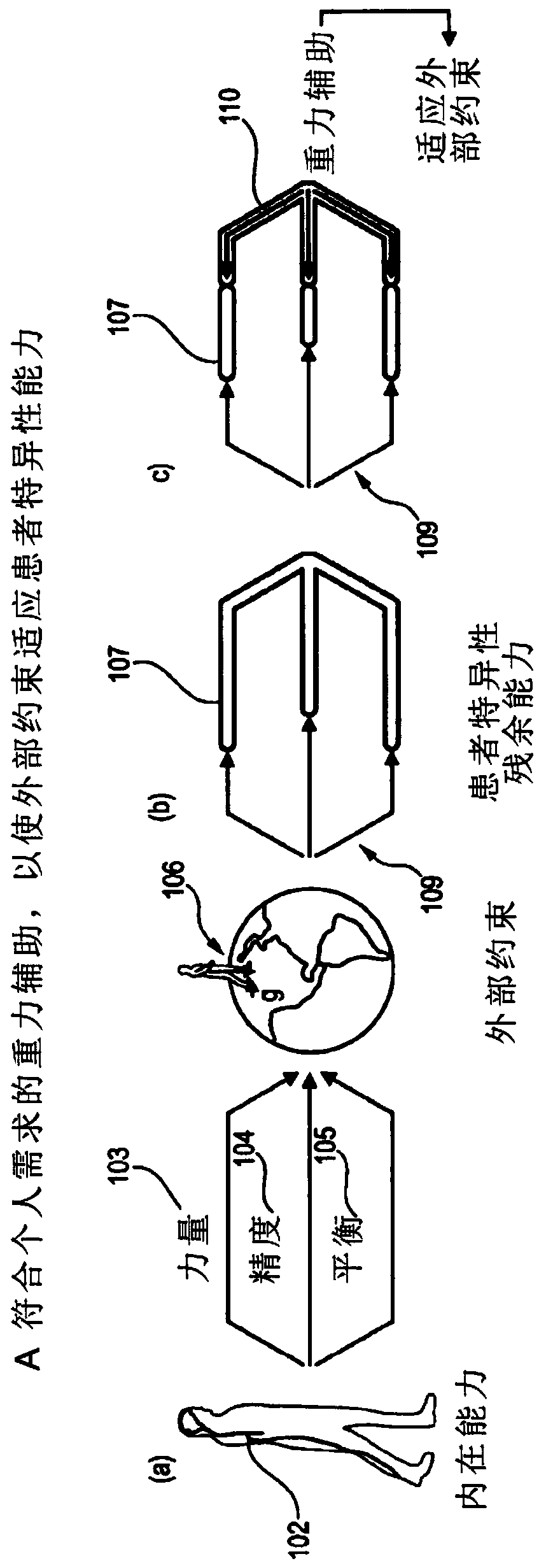
The present application relates to devices and systems for rehabilitation of the locomotor system, for example limbs. In particular, the present application discloses an apparatus, more in particulara robotic platform capable of optimizing gravity-dependent trunk movements, enabling overground locomotion in non-ambulatory individuals with spinal cord injury and stroke, while promoting durable motor improvement when delivered during gait rehabilitation facilitated by electrical spinal cord stimulation.
Description
[0001] The present application relates to the fields of motion control and medical engineering and, in some instances, to devices, methods, and / or systems for the rehabilitation of subjects with neurological disorders, such as the rehabilitation of locomotor systems including limbs. In one example, the present application discloses a device, more specifically a robotic platform capable of optimizing gravity-related torso motion, that enables an ambulatory individual with spinal cord injury and stroke to perform above-ground locomotion while simultaneously stimulating Promotes long-lasting movement improvements during gait rehabilitation. Background technique [0002] Gait restoration after neurological disease requires remastering the interplay between body mechanics and gravity. Despite the importance of gravity-related gait interactions and active engagement in facilitating this learning, relatively little attention has been paid to these essential elements of gait rehabilit...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): A61N1/05A61B5/00A61B5/04A61B5/0476A61B5/0488A61B5/11A61N1/36A63B24/00A63B69/00A61H1/02B25J9/00A61H3/00A61G7/10
CPCA61B5/7282A63B69/0064A61H3/008A61B5/112A61B5/1121A63B24/0087A61N1/0551A61N1/36003A61N1/36067A61B2562/0219A61B2562/0247A61H2201/165A61H2201/1666A61H2201/5007A61H2201/5061A61H2201/5069A63B2213/004A63B2220/10A63B2220/51A63B22/0235A63B2220/805A63B2220/806A63B2230/60A61B5/389A61H3/00A61H2201/10B25J9/0006A61B5/395
Inventor乔基姆·冯·齐泽维茨珍·白布提斯·米格纳多特卡米尔·乔其纱·玛莉·勒高夫葛瑞哥尔·库尔坦海克·瓦勒里
OwnerECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE (EPFL)