

Intelligent snow sweeping robot based on multi-sensory interaction
A robotic and intelligent technology, applied in snow surface cleaning, construction, cleaning methods, etc., can solve the problems of poor mobility, road damage, and difficulty in precise control of hydraulic and pneumatic components, so as to improve energy efficiency and impact resistance. Strong, improve the effect of battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with accompanying drawing and specific embodiment thereof:
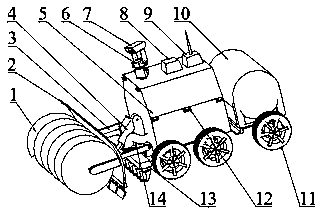
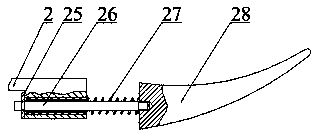
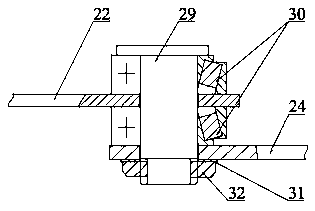
[0025] like figure 1 , figure 2As shown, an intelligent snow-plowing robot based on multi-sensory interaction includes two parts, one part is a host computer, and the other part is a robot body, and its robot body includes a 4+2 wheel drive assembly (15), a snow-push assembly (21), snow removal assembly (18), push rod motor (4), solar panel housing (5), steering gear (6), binocular camera (7), positioning device (8), communication device (9 ), high-pressure gas storage tank (10), ultrasonic sensor (12), voltage stabilizing and pressure regulating device (13), air guide pipe (14), separation shovel (19), air blowing device (17), 4+2 wheeled Drive assembly (15), 4+2 wheel drive assembly (15) is composed of movable chassis (22) (23), drive motor (23), anti-skid tires (11); snow pushing assembly is composed of Rotary cutting snow pu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More