

Bridge inspection system
A patrol inspection system and bridge technology, applied in control/adjustment systems, instruments, vehicle position/route/height control, etc., can solve the problems of poor data acquisition stability, low degree of automation, heavy workload, etc., to ensure safe return , Improve the degree of automation and reduce the effect of difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
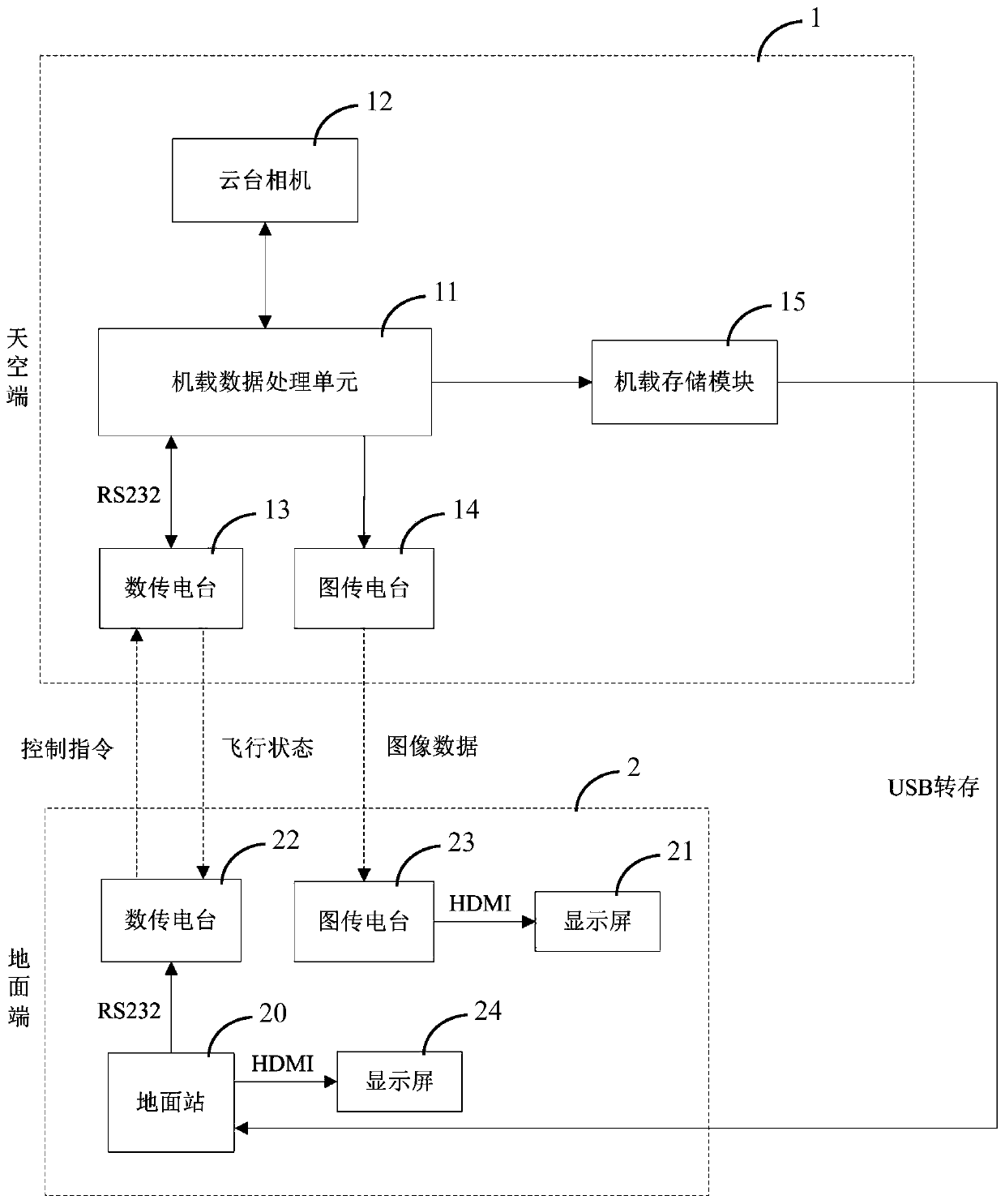
[0076] as attached image 3As shown, an embodiment of the bridge inspection system of the present invention specifically includes: an unmanned aerial vehicle system 1 and a ground terminal system 2 . The unmanned aerial vehicle system 1 further includes an unmanned aerial vehicle 10, and an airborne data processing unit 11, a pan-tilt camera 12, a flight control module 16, an obstacle avoidance module 110 and a positioning module 111 mounted on the unmanned aerial vehicle 10, and the ground terminal system 2 further comprises a ground station 20. The UAV 10 performs the first inspection operation on the bridge to be detected under manual operation, and collects bridge surface data through the pan-tilt camera 12, and according to the positioning signal obtained by the positioning module 111 (such as: using GNSS signals, Global Navigation Satellite System, The abbreviation of global navigation satellite system, such as GPS, Glonass, Galileo, Beidou satellite navigation system, ...
Embodiment 2
[0090] An embodiment of the bridge inspection UAV system applied to Embodiment 1, specifically including: UAV 10, and an airborne data processing unit 11 mounted on UAV 10, a pan-tilt camera 12, a first The digital transmission station 13 and the first image transmission station 14. During the automatic inspection operation, the airborne data processing unit 11 sends bridge surface data acquisition control signals to the pan-tilt camera 12 , and the airborne data processing unit 11 sends flight control signals to the UAV 10 . The PTZ camera 12 acquires high-definition data on the surface of the bridge, and the bridge video data collected by the PTZ camera 12 is sent to the first image transmission station 14 through the onboard data processing unit 11, and the bridge video data is sent to the ground by the first image transmission station 14 The end system 2 performs display monitoring. The first data transmission station 13 is connected to the airborne data processing unit 1...
Embodiment 3
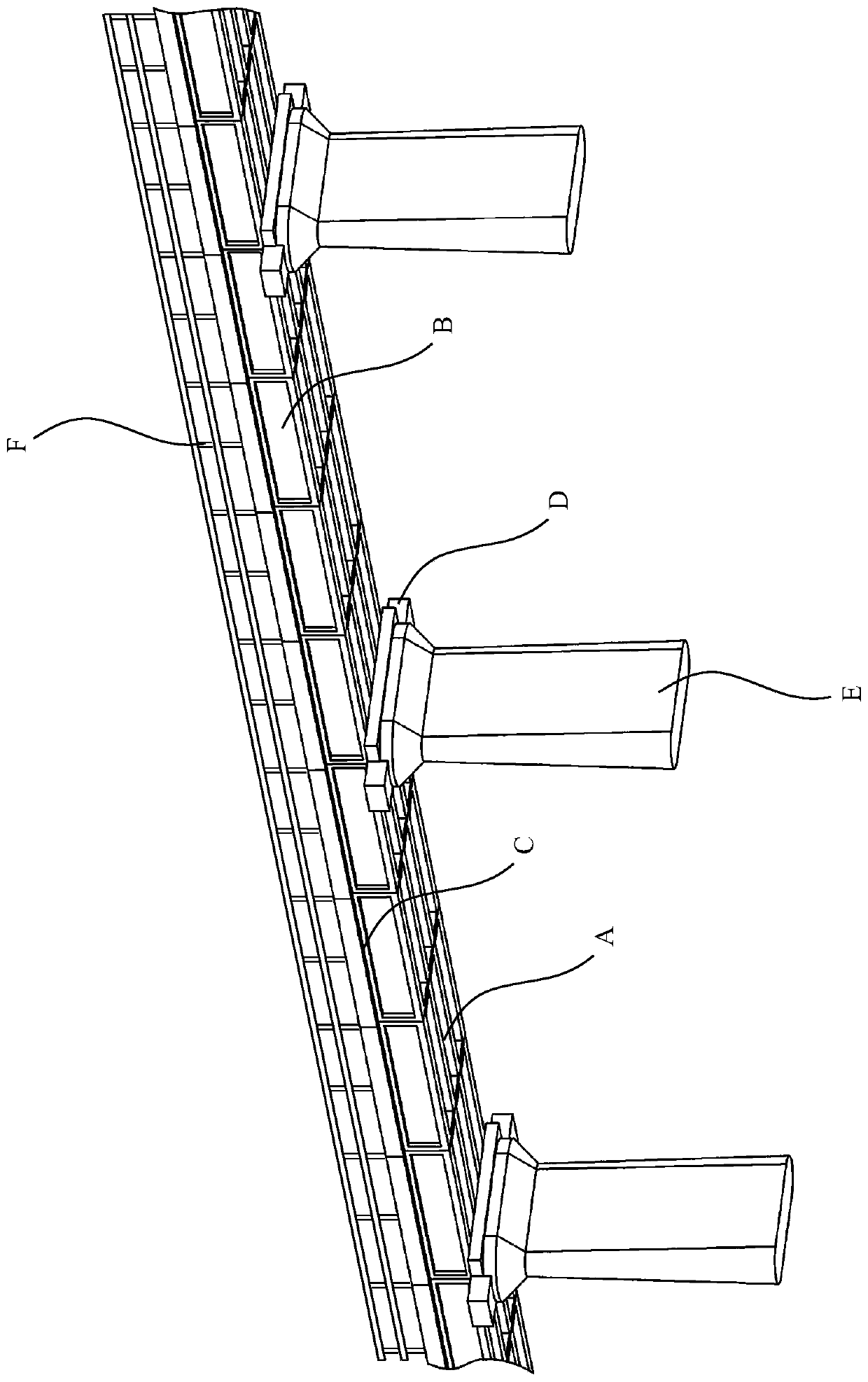
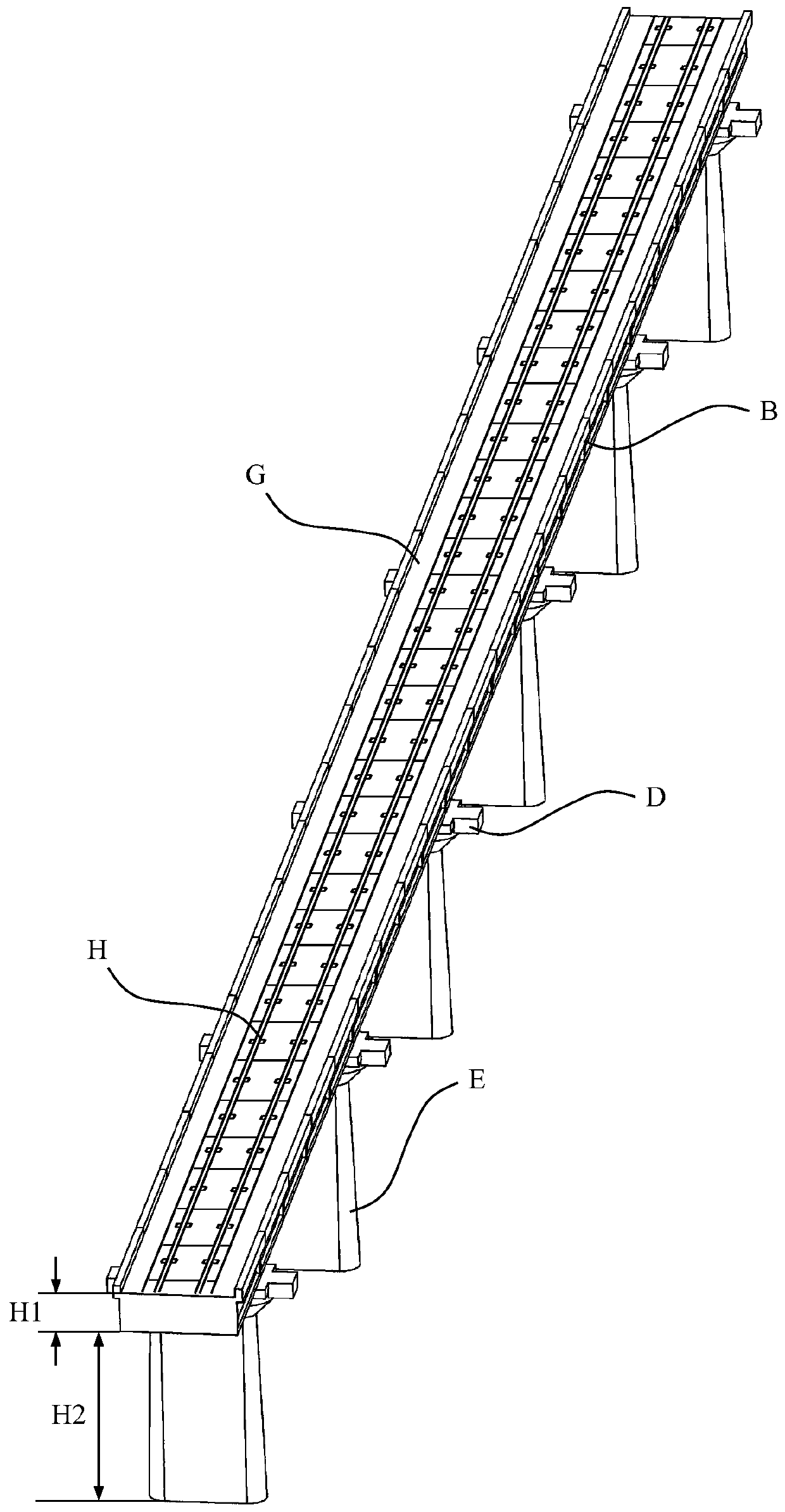
[0103] as attached Figure 9 And attached Figure 10 As shown, the bridge inspection UAV system uses a rail car 100 as a carrier, and the rail car 100 includes a driver's cab 101 and a carriage 102 . The ground terminal system 2 is set in the driver's cab 101, the UAV system 1 is set in the compartment 102, and the communication antennas of the second data transmission station 22 and the second image transmission station 23 are set outside the body of the rail car 100 to facilitate data reception .
[0104] The unmanned aerial vehicle 10 is carried on the rail vehicle 100, and the unmanned aerial vehicle system 1 is transported to the bridge to be detected by the rail vehicle 100. On the lines on both sides of the bridge, one or more platforms are solidified with concrete as the fixed take-off and landing platforms of the UAV 10 . When the bridge inspection UAV system is in operation, the rail vehicle 100 arrives at the bridge to be inspected, and the staff first places the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More