

Vehicle queue stability control method considering vehicle dynamics parameter uncertainty
A technology of parameter uncertainty and vehicle dynamics, applied in the direction of total factory control, total factory control, electrical program control, etc., can solve the problems that the robust control theory needs to be further improved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In the drawings, the same or similar reference signs are used to indicate the same or similar elements or elements with the same or similar functions. The embodiments of the present invention will be described in detail below in conjunction with the drawings.
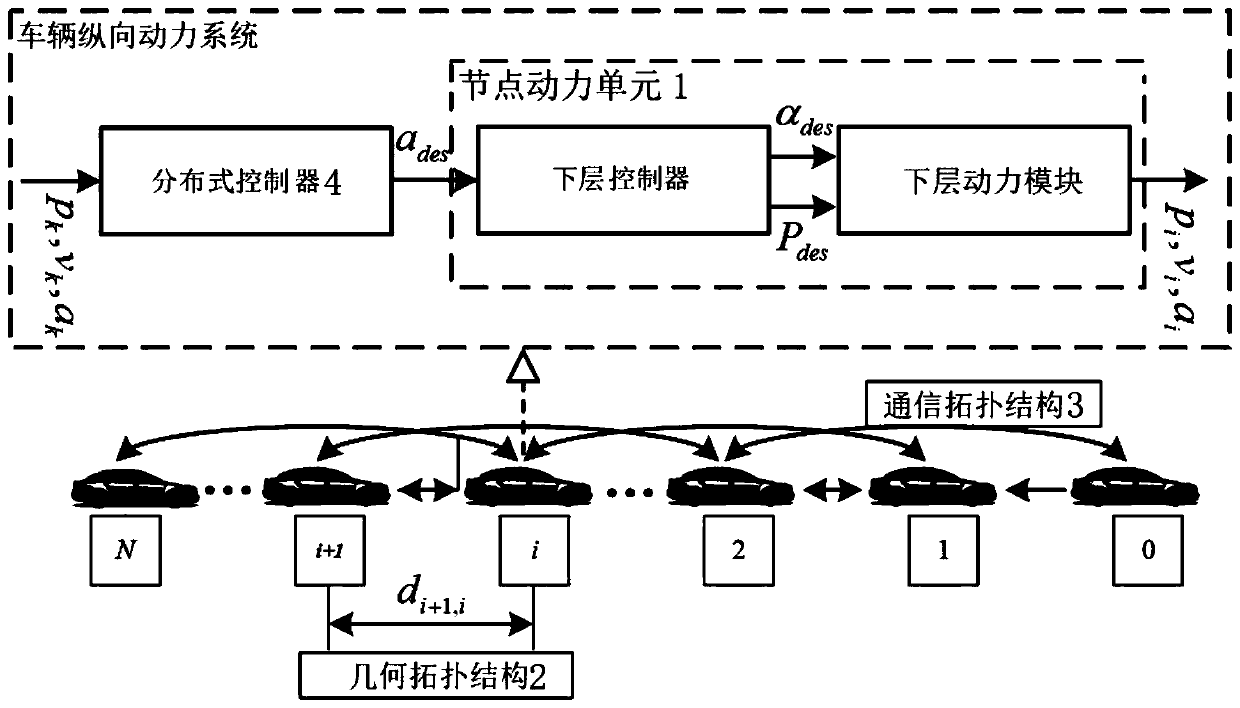
[0060] Such as figure 1 As shown, the vehicle platoon stability control method considering the uncertainty of vehicle dynamics parameters provided by this embodiment includes the following steps:
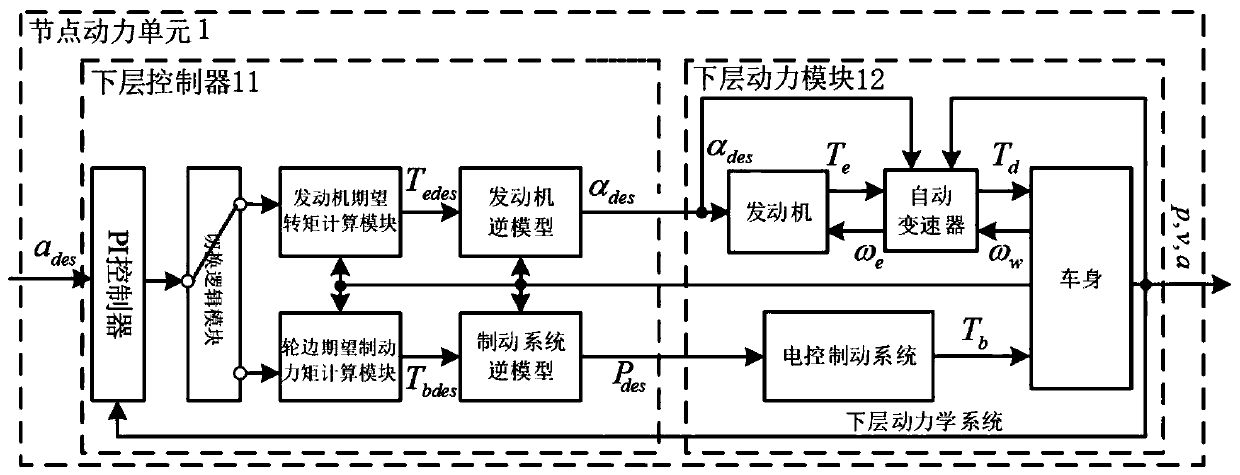
[0061] Step 1. The vehicle queue includes N+1 member vehicles, and N is a natural number greater than 1, and a mathematical model of the vehicle queue following is established: the mathematical model includes node power unit 1, geometric topology structure 2, communication topology structure 3, and distribution Type controller 4, a member car corresponds to a node, wherein the node power unit 1 according to the input expected acceleration a des , To obtain the desired throttle opening α des Or desired brake pressure P des ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More