

A small target detection method based on an unmanned aerial vehicle
A technology for small target detection and unmanned aerial vehicles. It is applied in the field of online target detection and unmanned aerial vehicles. It can solve the problems of noise and light sensitivity, small size, multi-layer nonlinear processing, high computing and hardware costs, and reduce labor costs. , the effect of improving the accuracy rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0067] In this embodiment, a test platform is built using a quadrotor UAV (DJI M-100) and a Mac notebook to verify the accuracy and real-time performance of the moving target detection and tracking algorithm. The drone DJI M-100 is loaded with the onboard computer Manifold, camera sensor, GPS and IMU modules. The drone has an overall payload of less than 500g and can fly for 15 to 20 minutes.
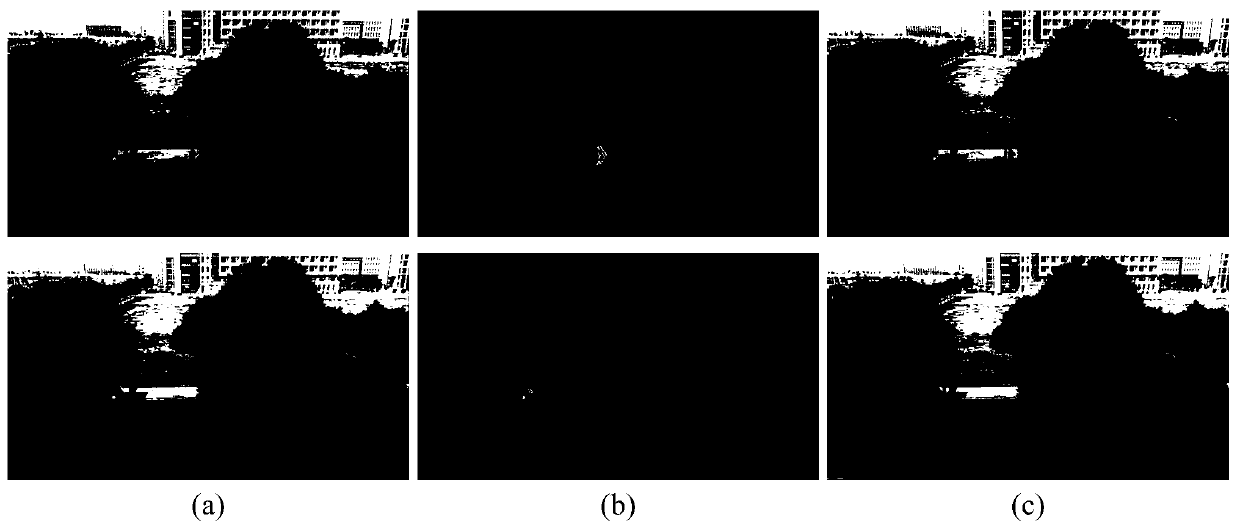
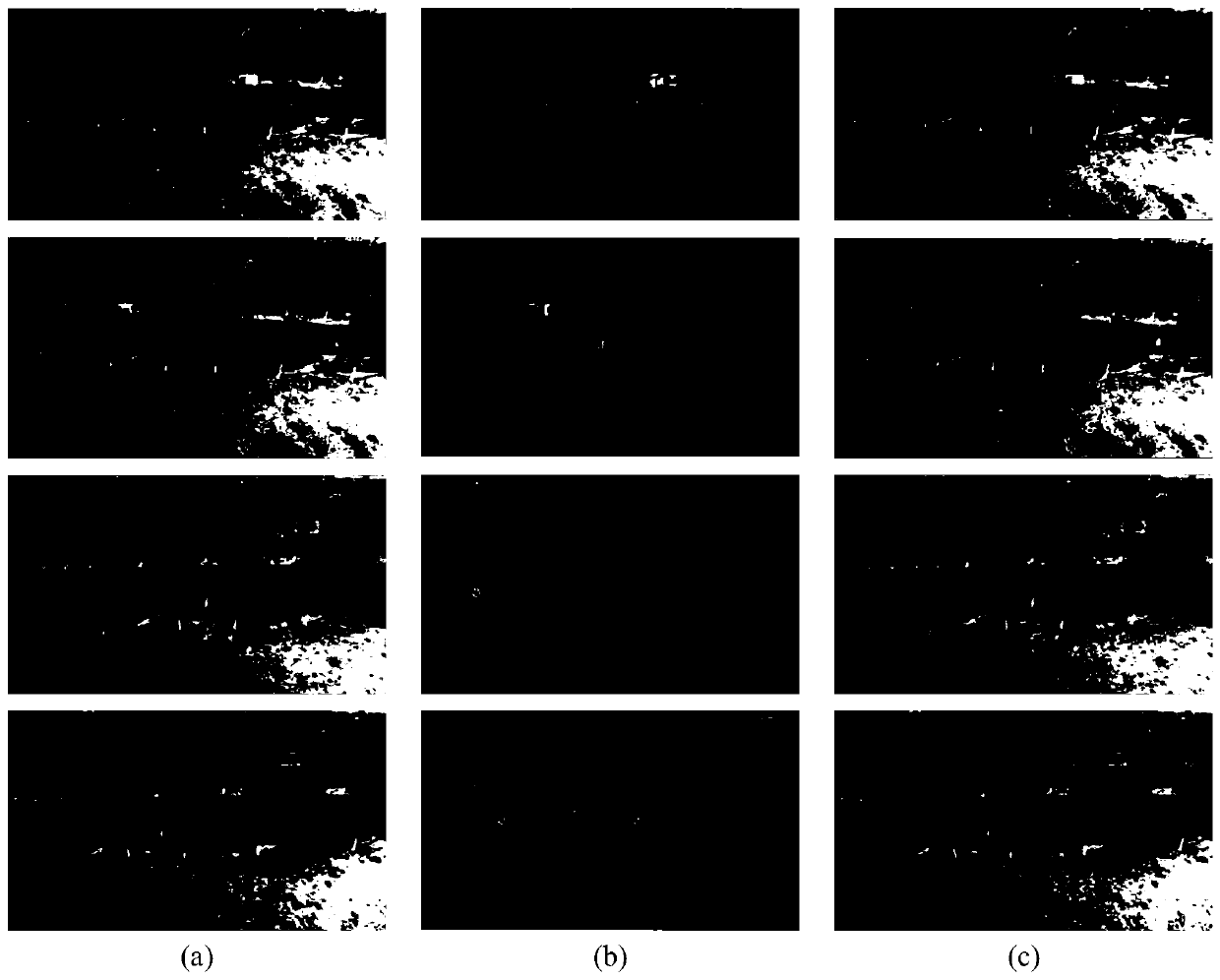
[0068] Based on the built test platform, the performance of the target detection module is verified in two different scenarios. The scenarios are as follows: figure 2 and 3 shown. figure 2 In the representative scene, only one moving target is captured by the camera of the drone, and the drone is flying in the low sky and circling; image 3 In the scene represented by , there are multiple moving targets, and the UAV is flying at a relatively high altitude. From the figure, we can clearly see that in both cases, the moving target is blocked by obstacles and trees.
[0069] figur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More