

Exoskeleton robot and detection method for detecting human motion intention
A technology of exoskeleton robot and motion mode, which is applied in the direction of motion accessories, manipulators, sensors, etc., can solve the problems of poor effect, limit the working ability of HAL exoskeleton, and difficult acquisition, so as to improve adaptability and reduce real-time capture effect of demand
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
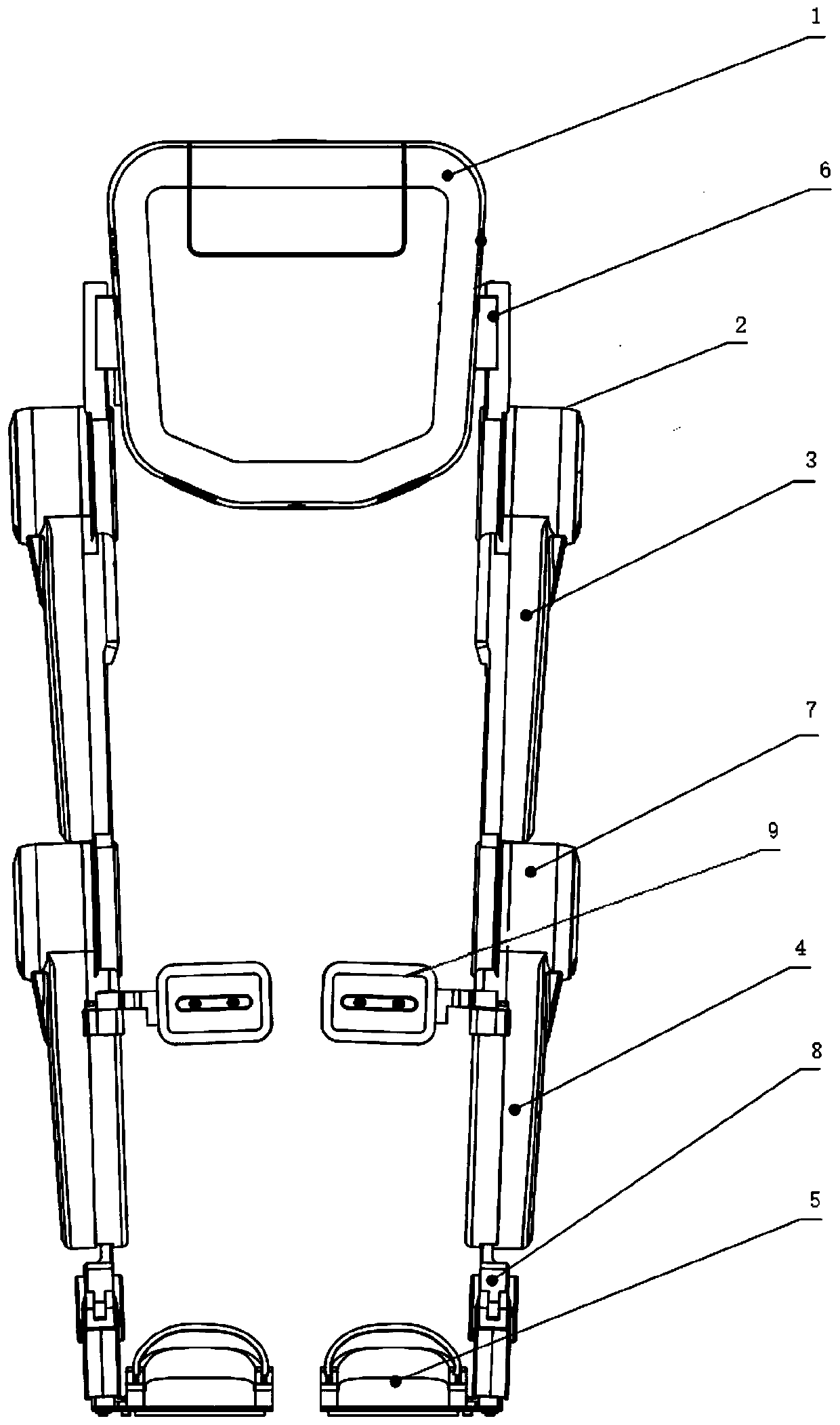
[0048] Such as Figure 1-6 as shown, figure 1 A structural schematic diagram of an exoskeleton robot body of an exoskeleton robot provided by the present invention (the connecting straps at the thigh are not shown);
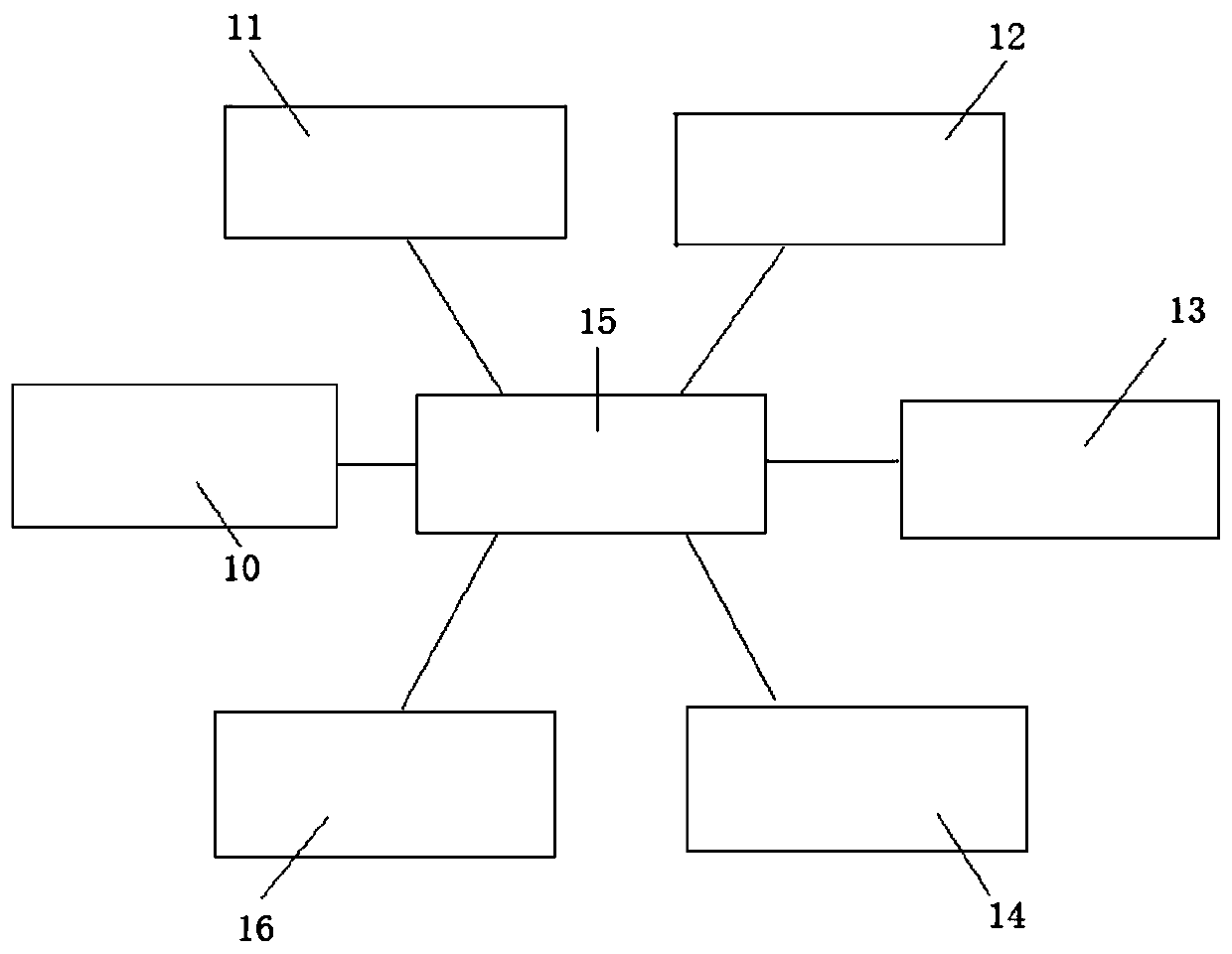
[0049] figure 2 It is a schematic diagram of the structure between the perception system, control system and drive system of an exoskeleton robot provided by the present invention;
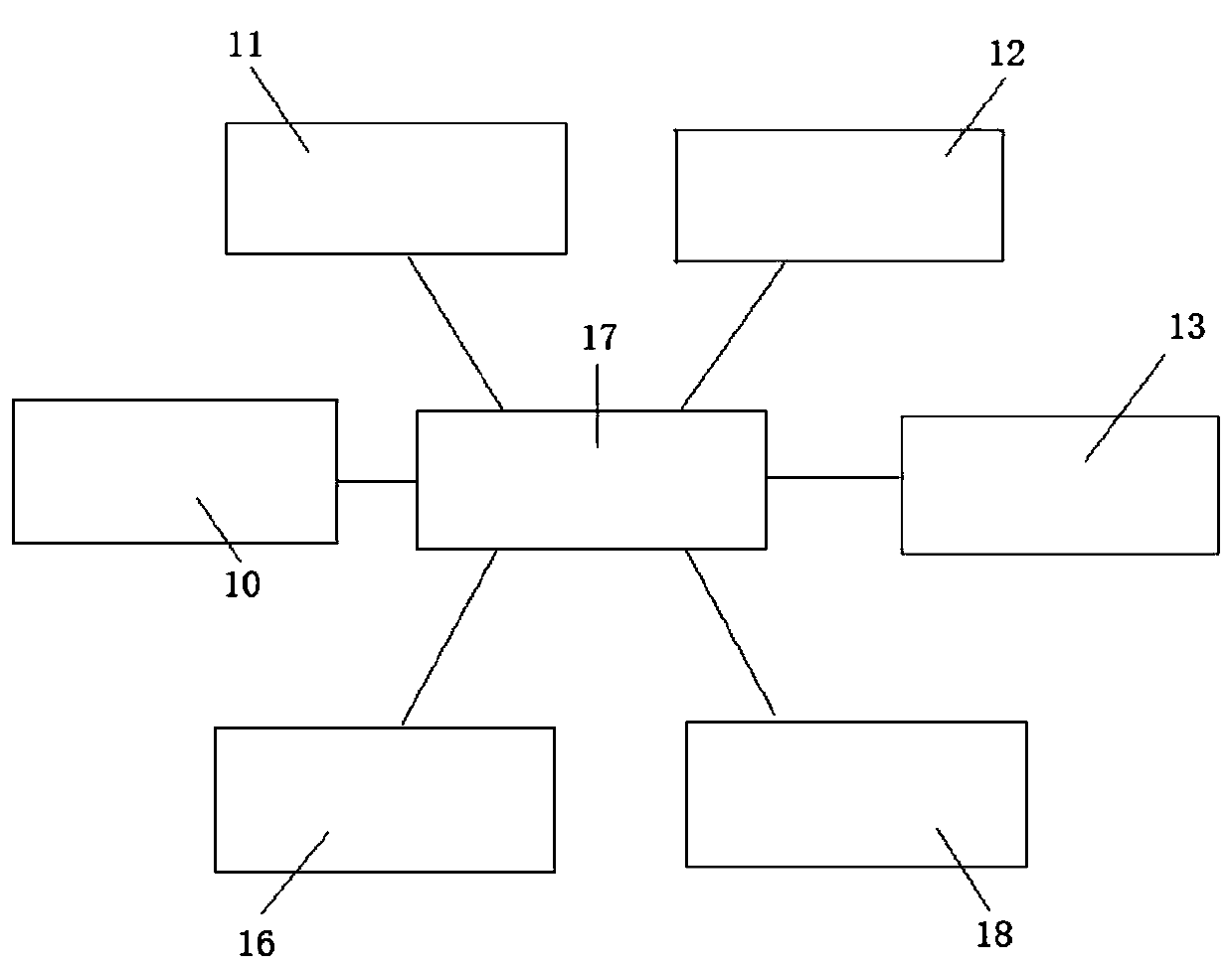
[0050] image 3 It is a schematic diagram of the structure between the perception system of an exoskeleton robot provided by the present invention, the machine filtering processing module, and the CNN machine learning module;
[0051] Figure 4 is a schematic diagram of the distribution of thin film strain gauge sensors; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More