

Shape detection system and method of flexible tentacles
A detection system and tentacle technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unrealistic, ineffective detection, and strain measurement, and achieve convenient and reliable data, reduced measurement errors, and simple operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
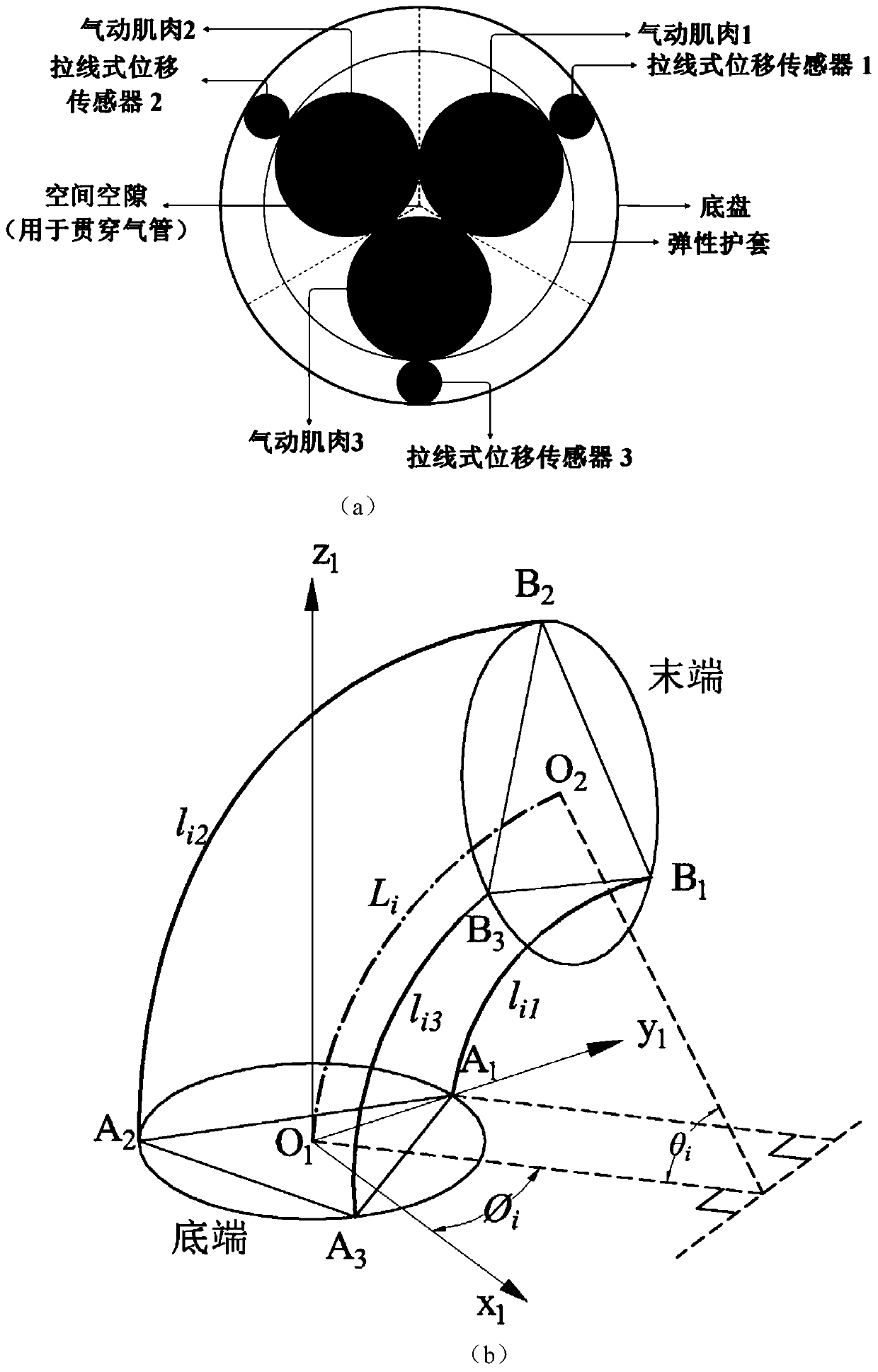
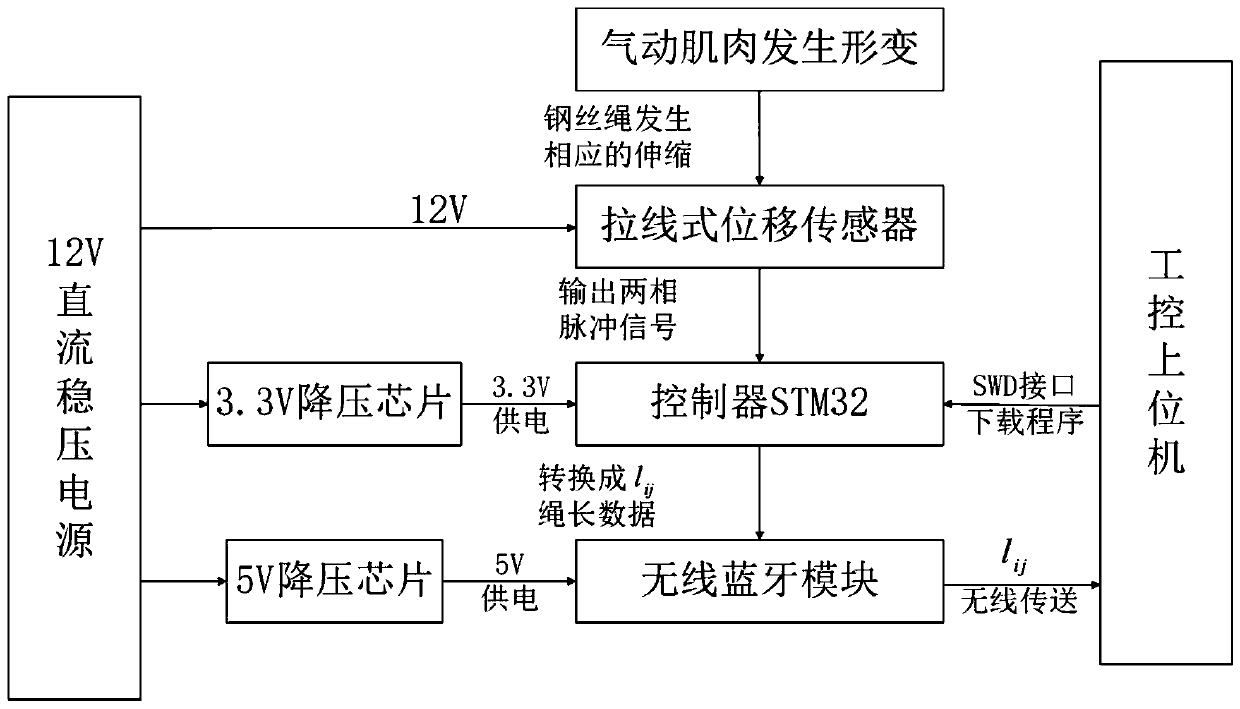
[0057] see Figure 1 to Figure 7 The detection system described in this embodiment includes an industrial control host computer, nine pull-wire displacement sensors, three controllers STM32, a wireless Bluetooth communication module, a 12V DC regulated power supply, and two step-down chips; the three controllers STM32 include the main Controller STM32 and two slave controllers STM32;
[0058] The specific steps of the detection method are as follows:
[0059] Step 1: Inflate the flexible tentacles. With the bending and deformation of the pneumatic muscles, the length of the steel wire rope attached to its surface will also expand and contract accordingly, and the pull-wire displacement sensor outputs AB two-phase pulse signals;
[0060] Step 2: The master and slave controllers STM32 decode and count the pulse signal, and then convert the number of pulses into the length data of each pneumatic muscle according to the accuracy of the pull-wire displacement sensor (0.12mm / p);
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More