

Smart manipulator device with function of feeling pulse
A technology of manipulators and robotic arms, applied in diagnosis, diagnosis recording/measurement, medical science, etc., can solve the problems of high cost, inaccuracy, and inability to press, etc., and achieve a comprehensive diagnosis effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
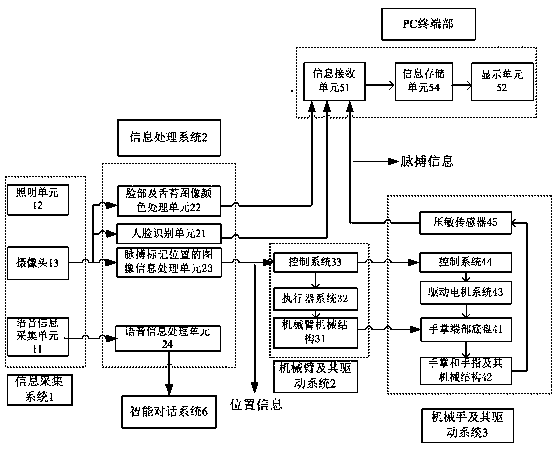
[0029] see Figure 1~Figure 5 , The robot-arm device for intelligent pulse diagnosis includes an information collection system 1, an information processing system 2, a robot arm and its drive system 3, a robot arm and its drive system 4, a PC terminal 5 and an intelligent dialogue system 6. It is characterized in that: the information acquisition system 1 is connected with the information processing system 2, the information processing system 1 is connected with the robotic arm and its driving system 3 and the PC terminal 5 at the same time, the robotic arm and the robotic arm are connected together, and the robotic arm and the information processing system are connected together. 2-phase connection, the drive motor and control module of the manipulator and the manipulator are placed inside the arm and palm.
[0030] refer to figure 1 , The robot-arm device for intelligent pulse diagnosis is characterized in that it includes an information acquisition system 1, an information...
example example 3
[0037] Example Example 3: This embodiment is basically the same as Embodiment 2, and the special features are as follows:
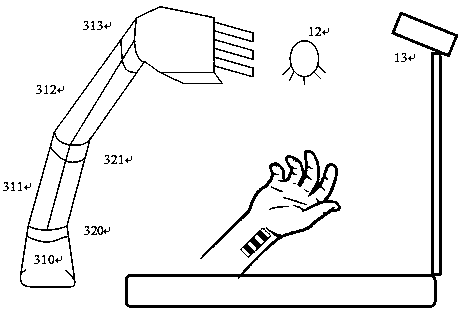
[0038] refer to figure 2 , the mechanical arm structure terminal 313 is connected to the chassis 41 at the end of the robotic palm, and the robotic arm control system is placed inside the robotic arm base 310 . The lighting system provides a better photographing environment for the camera; the relative position of the robotic arm base 310 and the camera 13 remains unchanged, and the camera 13 is calibrated using the Zhang Zhengyou calibration method, then the coordinate system of the robotic arm base relative to the camera is determined. The pulse position of the human arm is labeled and placed at a suitable position on the workbench. The camera recognizes the label and extracts the position information of the label relative to the base of the robot arm. The position information is transmitted to the robot arm control system. The movement of the robot ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More