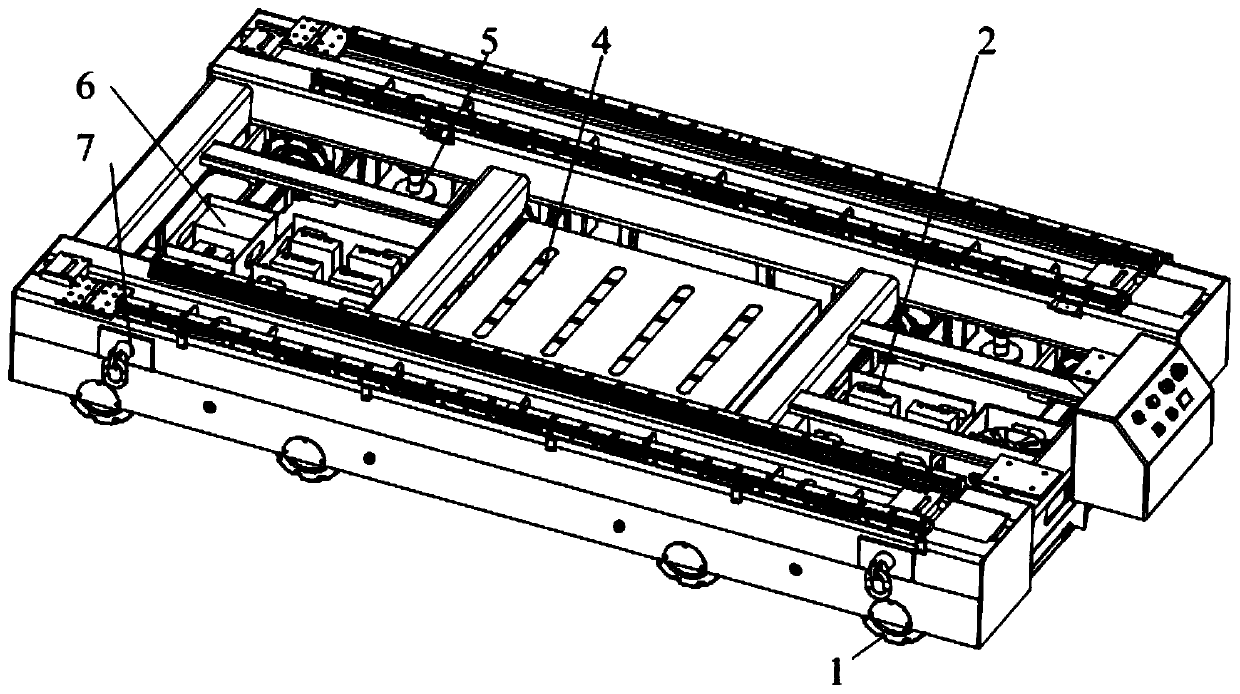
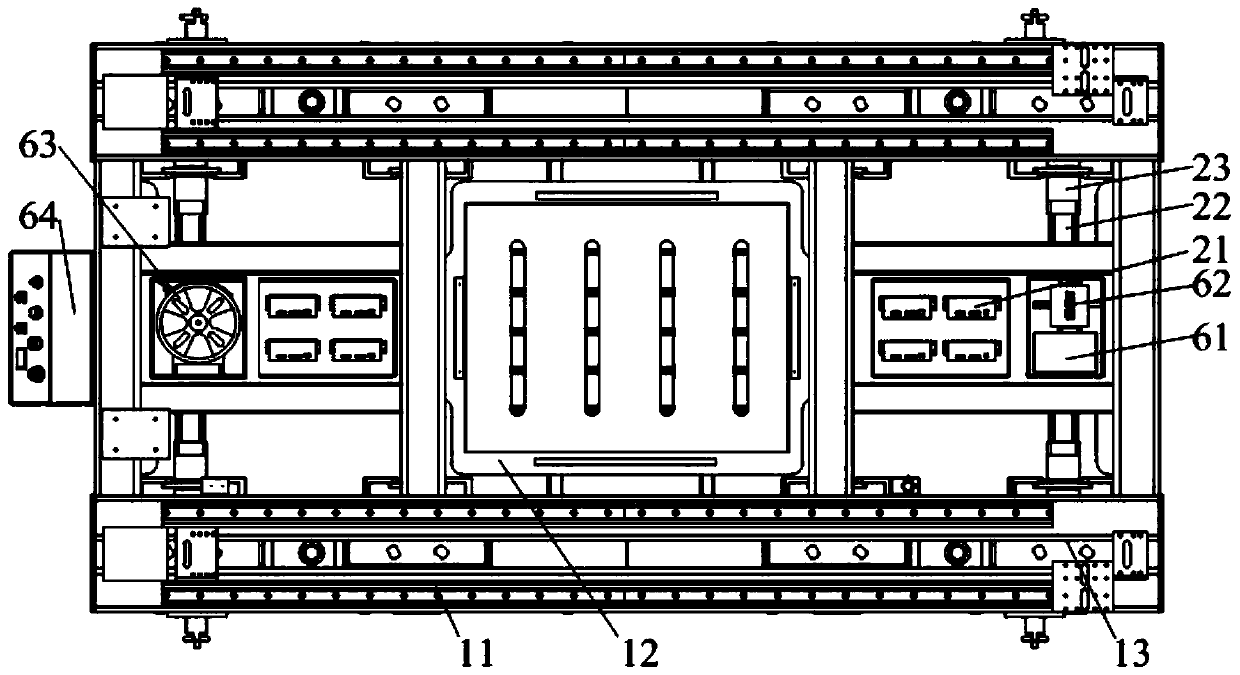
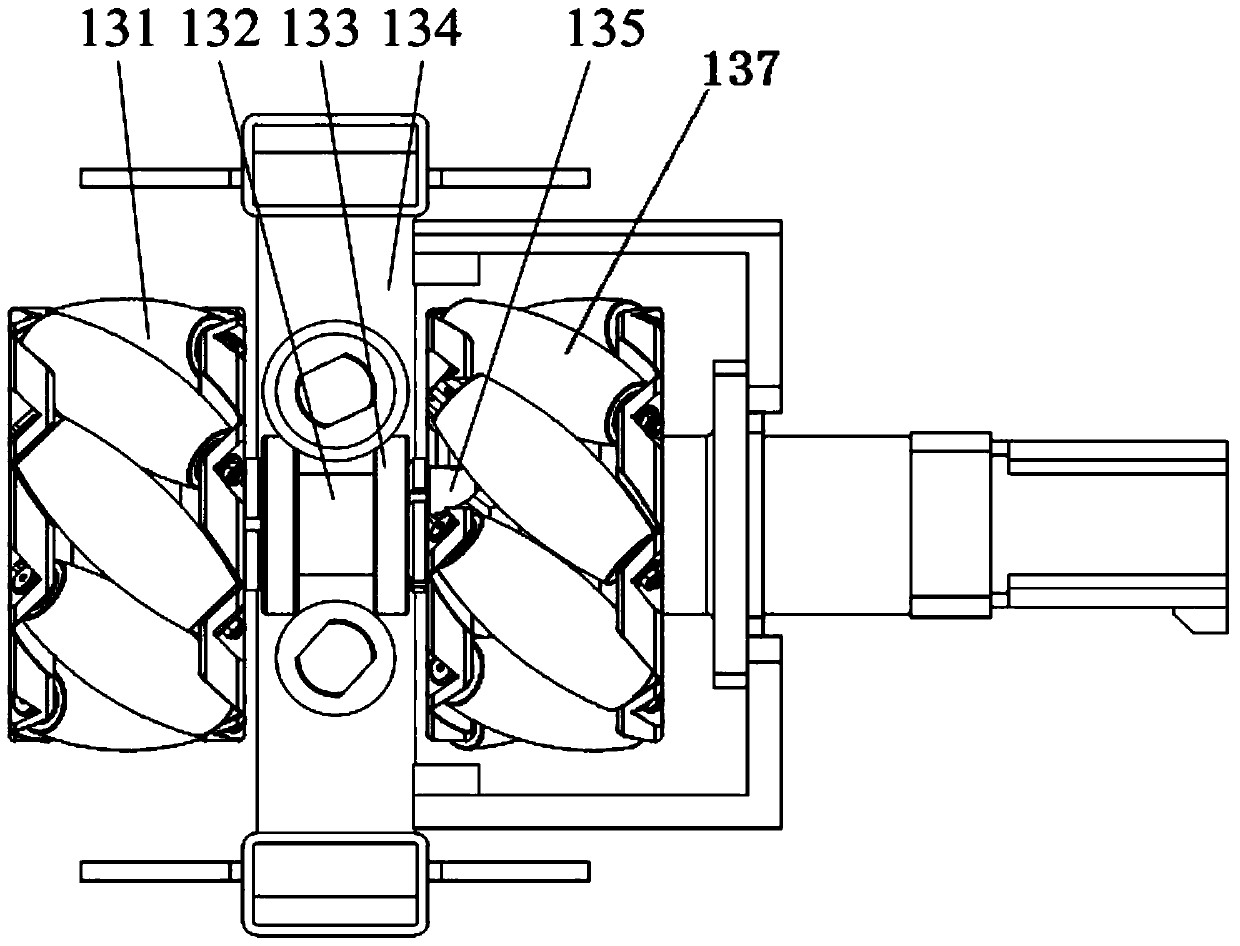
Heavy-load automatic guided vehicle (AGV) carrying platform capable of realizing omnidirectional movement
A technology of omnidirectional movement and carrying platform, which is applied in the field of mobile robots, can solve the problems that the wheels cannot be in contact with the ground, the movement stability cannot be guaranteed, and the large load cannot be satisfied, and it can achieve simple structure, stable operation, and large load capacity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0024] The object of the present invention is to provide a heavy-duty omnidirectional mobile AGV carrying platform to solve the problems in the prior art above, which can realize omni-directional operation, high stability and large load.
[0025] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More