

Balance improvement method used for collaborative robot assembling line and based on genetic algorithm
A technology of assembly production line and genetic algorithm, applied in the field of balance improvement of collaborative robot assembly production line, can solve problems such as spending a lot of time and not simulating the process of survival of the fittest in nature, and achieve the effect of shortening time, fast computing speed, and improving assembly efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
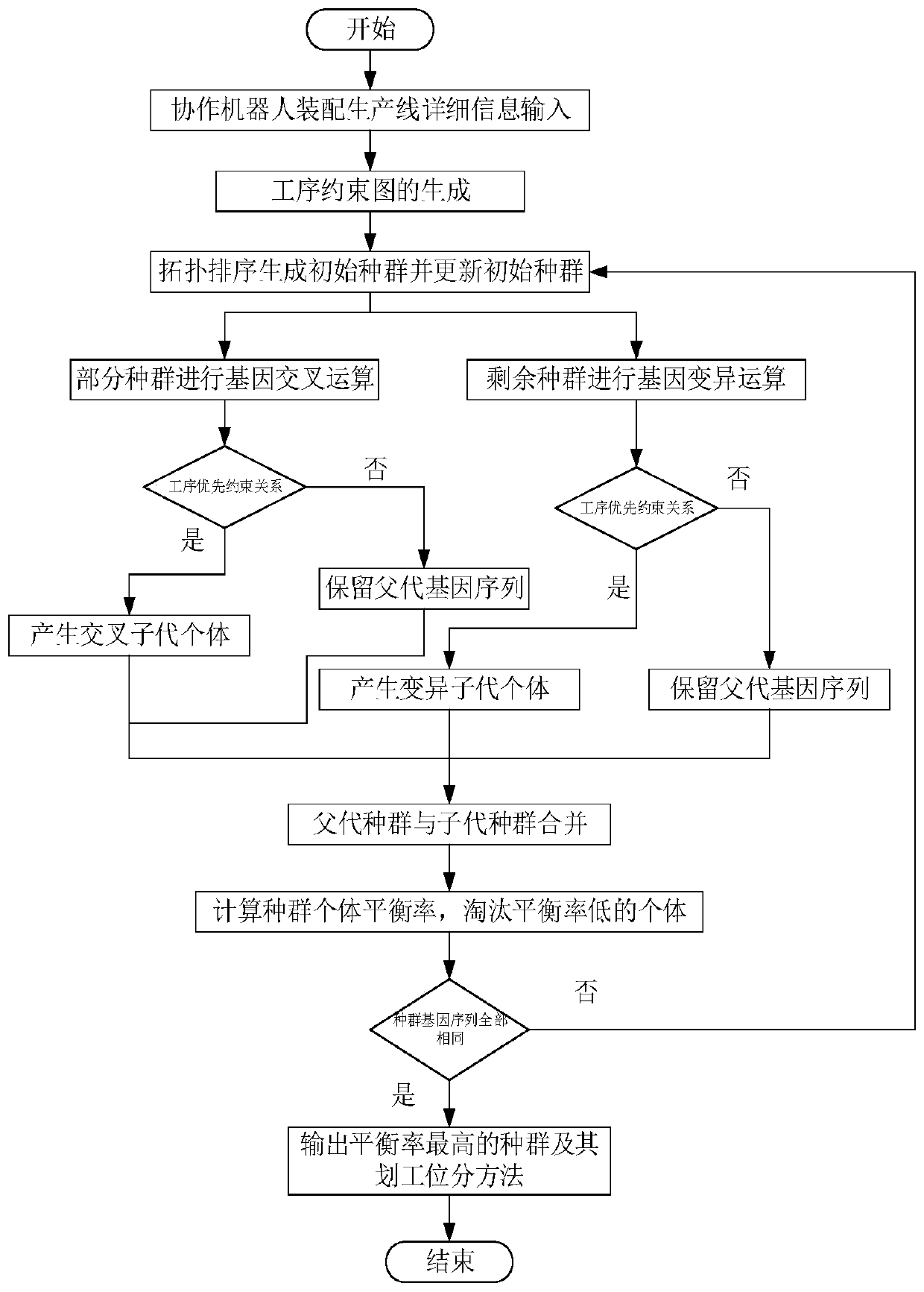
[0043] Refer to attached figure 1 , The specific implementation steps of the inventive method are as follows.
[0044] Step 1, the input of relevant information of the collaborative robot assembly line.
[0045] The input of relevant information of the collaborative robot assembly line, including the product name of the production line, the production cycle time, the name of each assembly task on the production line and the required assembly time, and the numbering of each process on the production line, the process number of the production line starts from 1 Numbered one by one, in addition, the probability of crossover operation and the probability of mutation operation of genes i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More