Mobile robot positioning navigation system and method based on teaching multi-sensor
A mobile robot, positioning and navigation technology, applied in two-dimensional position/channel control, control/adjustment system, instrument, etc., can solve the problems of high computing cost, etc., and achieve the effect of convenient method, easy to use, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further explained below in conjunction with the accompanying drawings and embodiments.
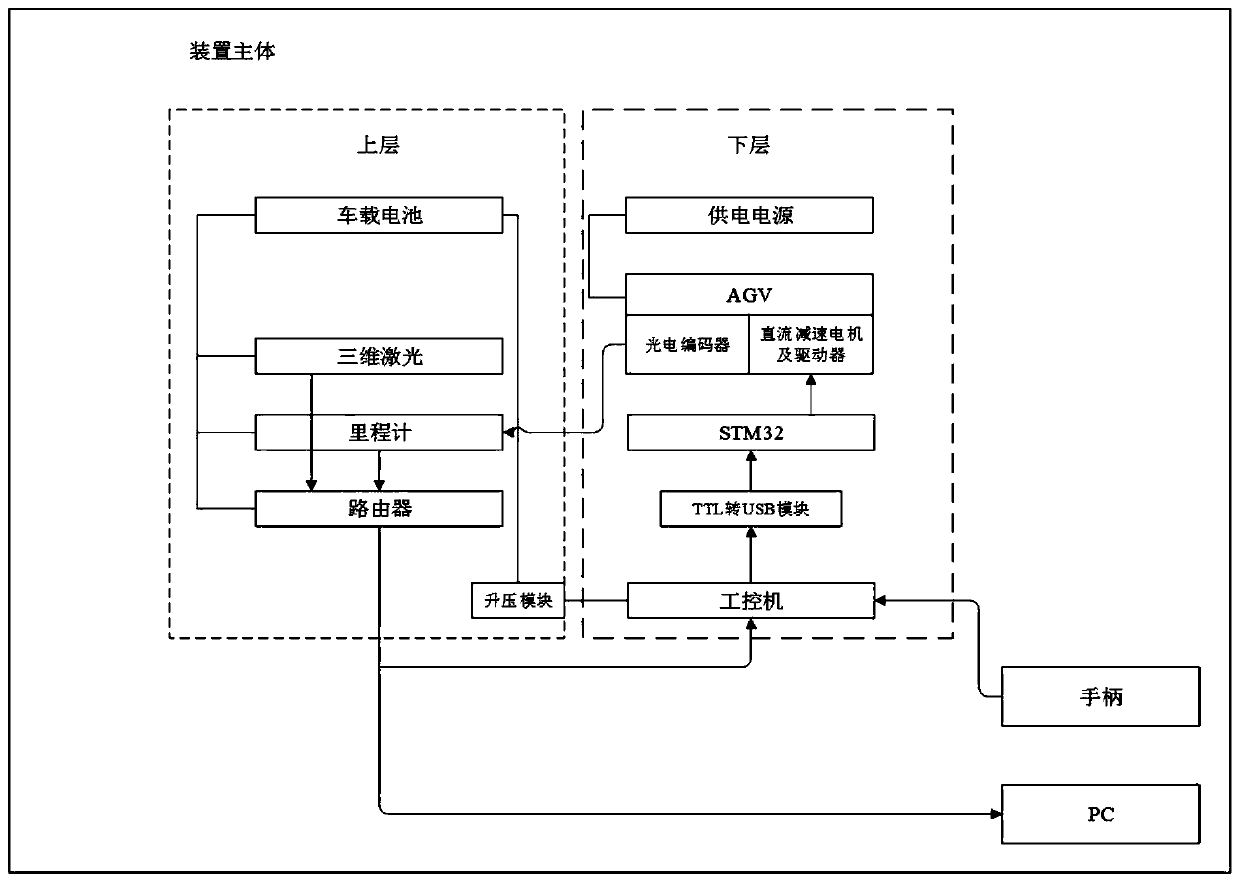
[0054] The overall structure of the system in this embodiment is as follows: figure 1 As shown, the model of the embedded development board is STM32, the model of the industrial computer is Jimmy gk400, the model of the TTL to USB module is CH340G, the model of the 3D laser is VLP-16, the model of the car battery is YSN-1211000, and the boost The model of the module is MKX-DC12V~19V, the model of the car battery is KEMV 12V100A, the model of the power supply is SKYRC IMAX B6, the model of the router is MERCURY MW325R, and the model of the handle is SonyPS3. In this embodiment, the connection relationship of each component is:
[0055] A multi-sensor mobile robot positioning and navigation system based on teaching: upper navigation module, lower motion control module, handle and computer;
[0056] The handle is connected to the lower control module, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com