

Fault-tolerant control method for position and pose system under blockage fault of steering engine of three-rotor unmanned aerial vehicle
A fault-tolerant control and three-rotor technology, applied in attitude control, vehicle position/route/height control, non-electric variable control, etc., can solve the impact of UAV flight performance, complicated stability analysis process, and difficult to reflect actuator failure Issues such as the real impact on drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
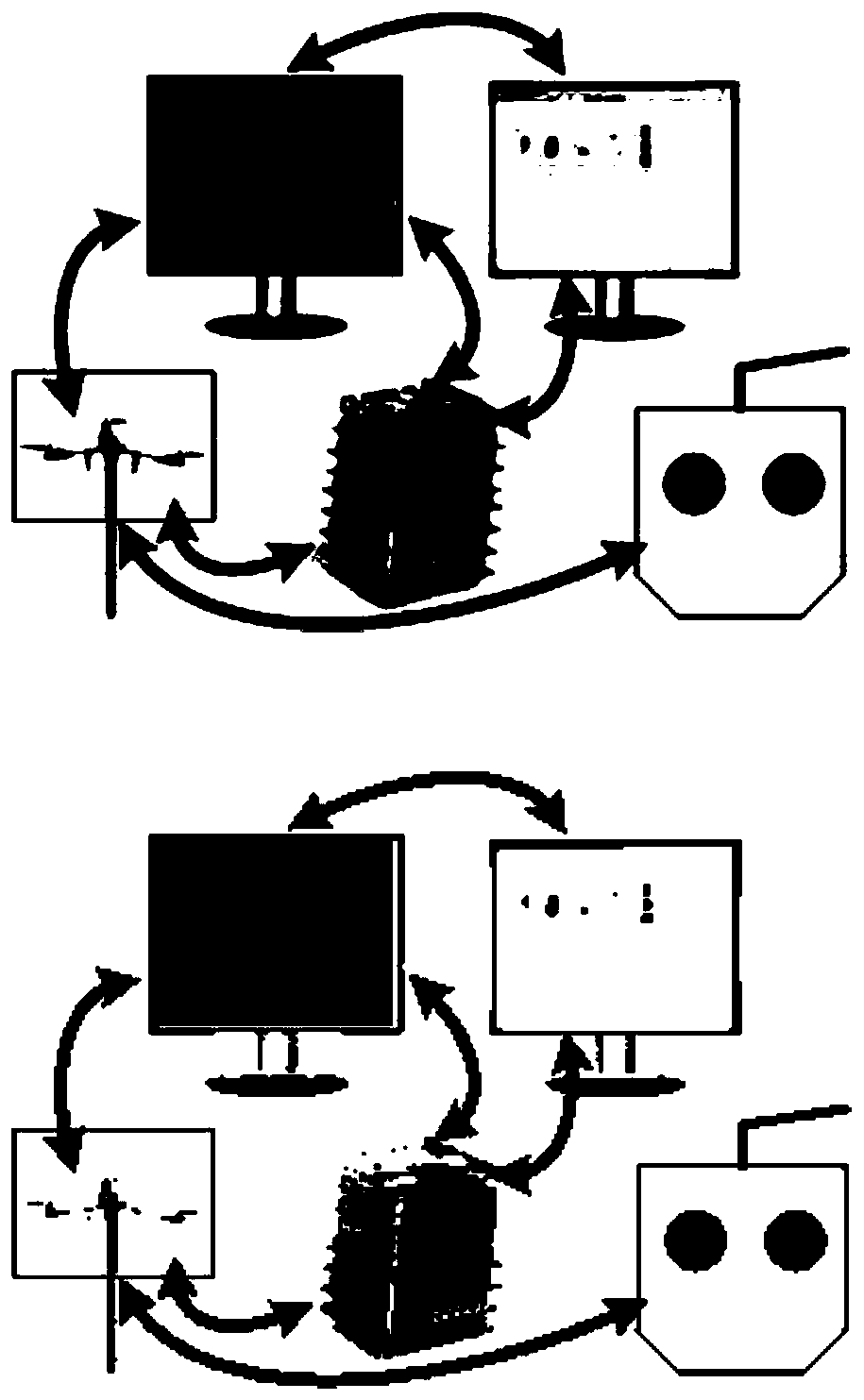
[0064] In order to fill the gaps in the existing research, the present invention will abandon the control of the yaw channel, aiming at the stability control problems of the altitude channel, the lateral position channel and the longitudinal position channel, as well as the roll channel and the pitch channel, the fault-tolerant controller is implemented by using the inner and outer loop control method the design of. The steps are as follows: First, define the inertial coordinate system {I} and the body coordinate system {B}. By analyzing the dynamic characteristics of the trirotor UAV and considering the influence of external disturbance and unknown air damping, the occurrence of the trirotor UAV is obtained. Nonlinear dynamic model when the steering gear is jammed:
[0065]
[0066]
[0067] The variables in formula (1) are defined as follows: parameter Π 1 Denotes the height channel dynamics model, parameter Π 2 Indicates the dynamic characteristics of the translatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More