Robot assembly operation demonstration programming method and device based on reverse engineering
A technology of reverse engineering and programming method, applied in the field of demonstration programming of robot assembly operations based on reverse engineering, can solve the problems of high update frequency, lack of flexibility, shorten the reprogramming time of robots, etc., and achieve the effect of improving production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below, in conjunction with the accompanying drawings, the technical solution of the present invention will be further described through specific implementation methods:
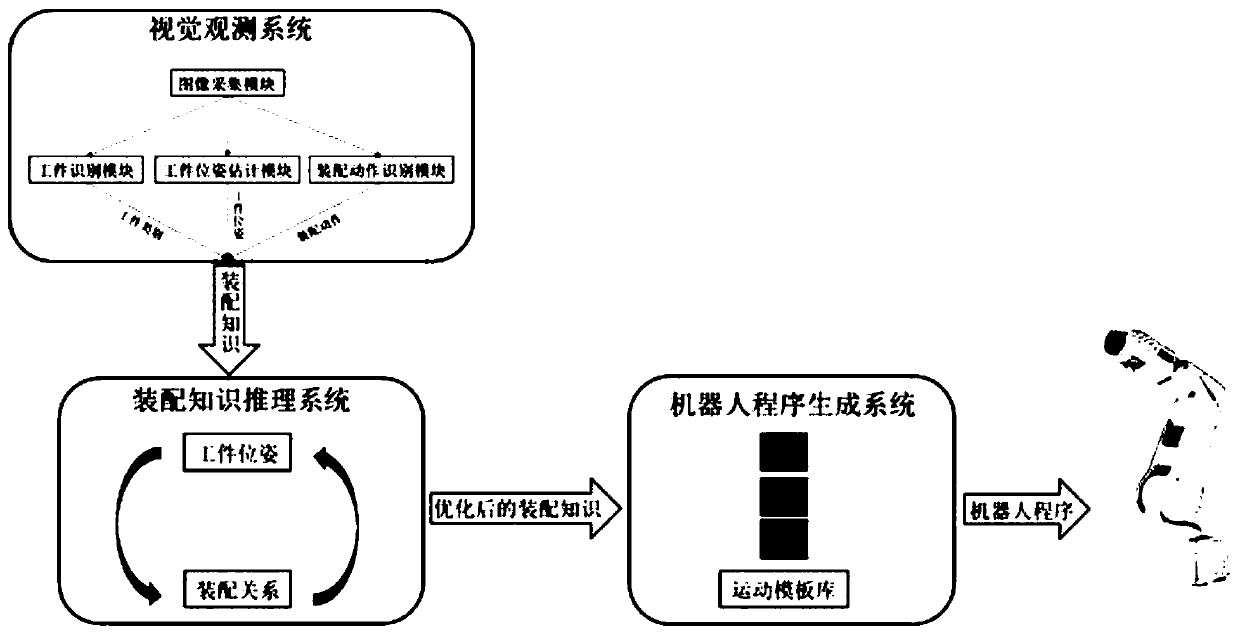
[0043] The invention discloses a robot assembly operation demonstration programming method and device based on reverse engineering, which is composed of the following systems: a workpiece model reconstruction system, a visual observation system, an assembly knowledge processing system and a robot program generation system, and each system includes Software algorithms and hardware devices used to realize specific functions.
[0044] The invention discloses a robot assembly operation demonstration programming method based on reverse engineering, comprising the following steps:
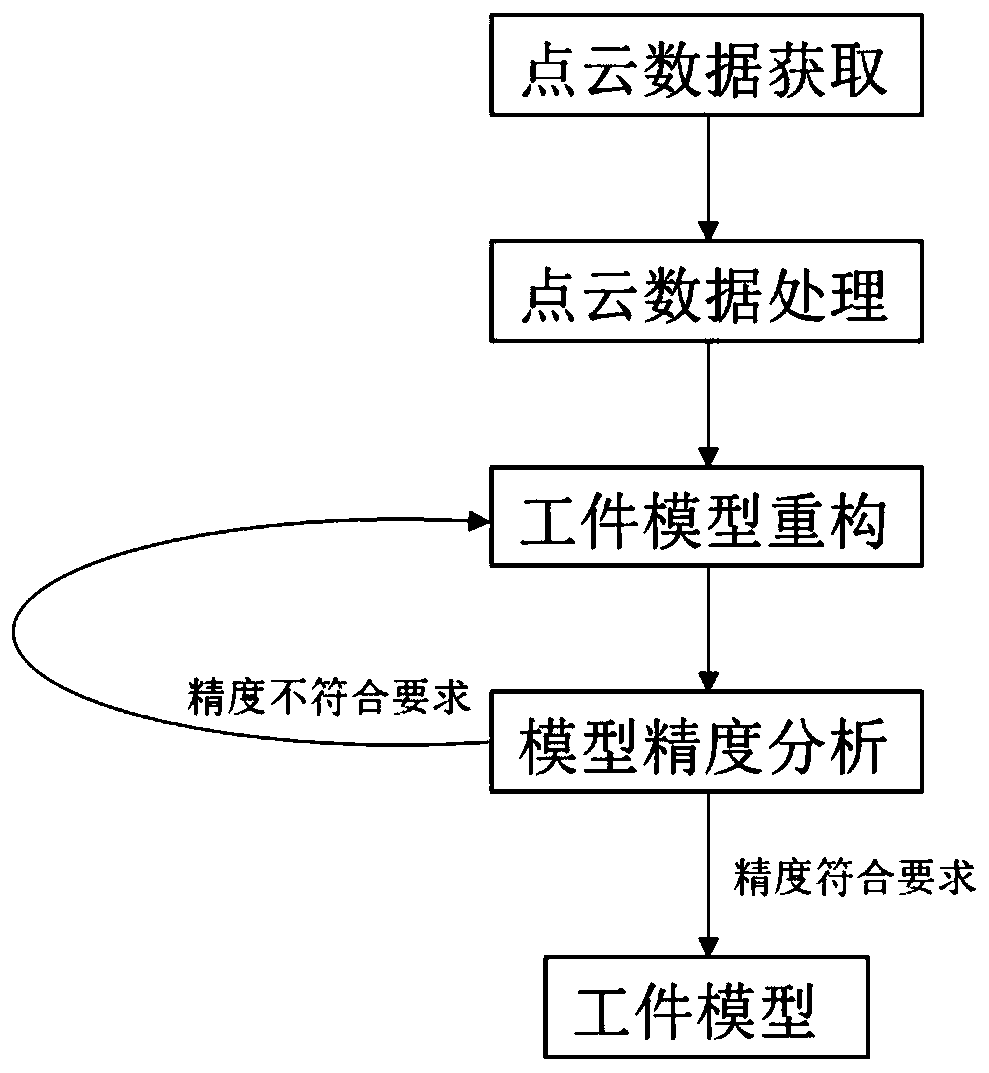
[0045] 1. In the workpiece model reconstruction system, use a 3D scanner to collect point clouds of each workpiece in the assembly, use point cloud filtering algorithms to process the collected point clouds, and use professional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com