Mobile robot visual following method based on deep reinforcement learning
A mobile robot and reinforcement learning technology, applied in the field of intelligent robots, can solve problems such as high hardware cost and design cost, increase system cost, system performance impact, etc., achieve good lighting changes, improve the level of intelligence, and reduce the effect of possibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The software environment of this embodiment is the Ubuntu14.04 system, the mobile robot adopts the TurtleBot2 robot, and the input sensor of the robot is a monocular color camera with a resolution of 640×480.
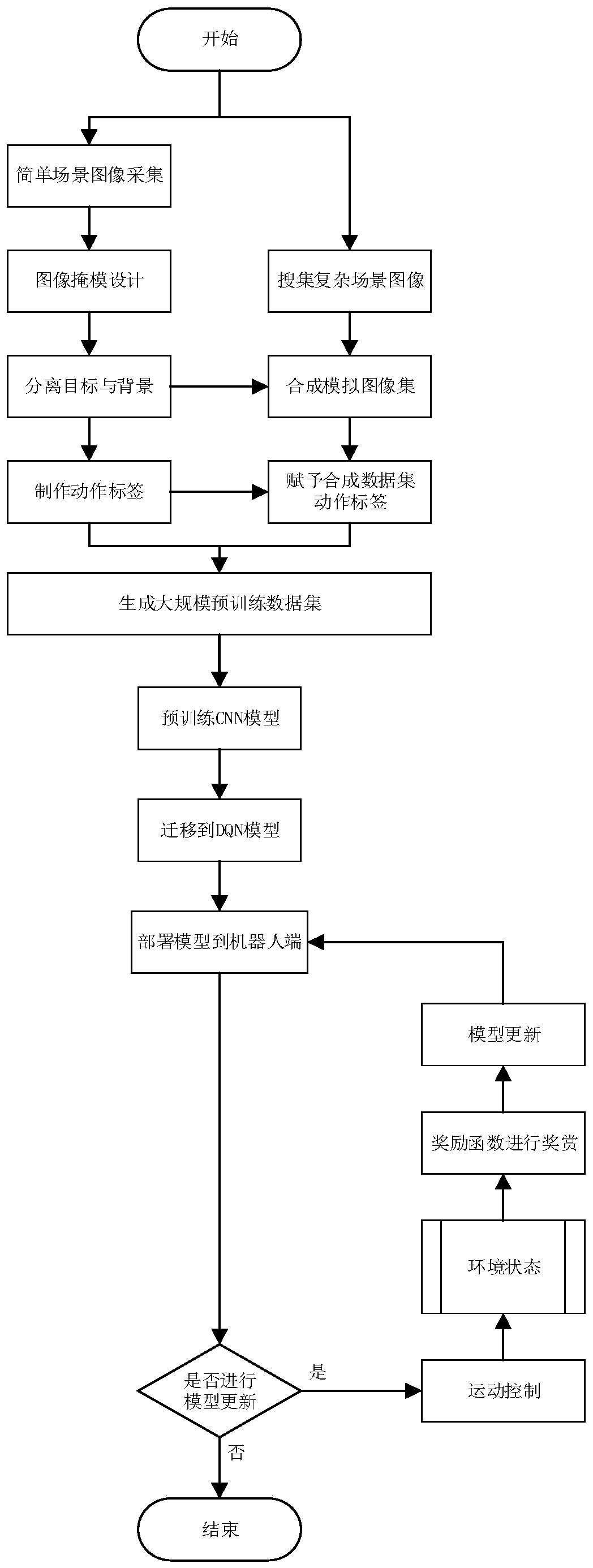
[0047] Step 1: Dataset automatic construction process
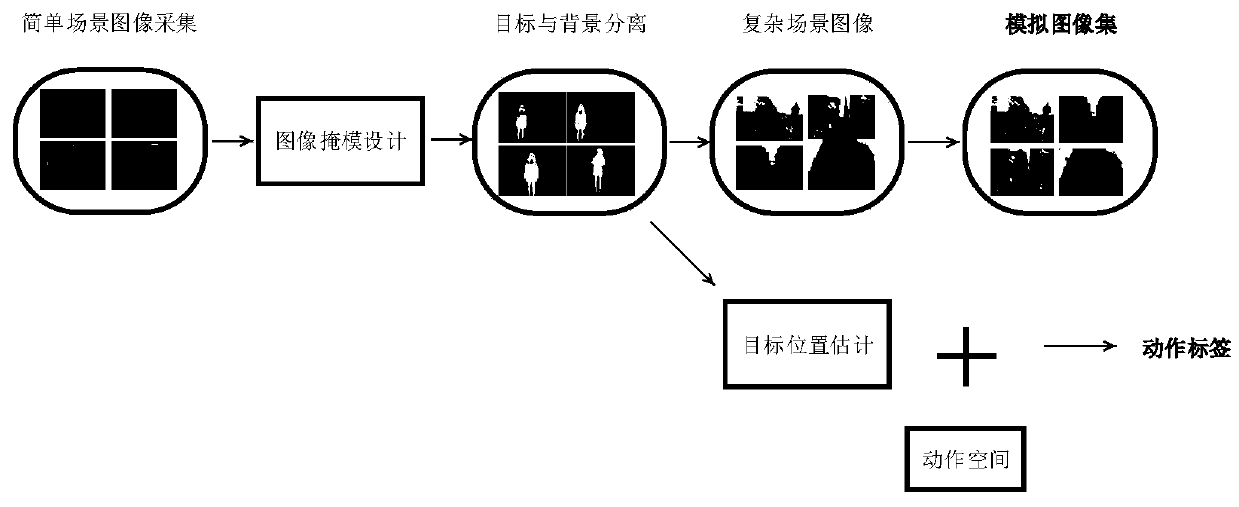
[0048] For the direction control model of the supervised following robot in the present invention, the input is the camera view image of the following robot, and the output is the action that the robot should take at the current moment. The construction process of the entire dataset includes two parts: the acquisition of the input field of view image and the labeling of the output action.
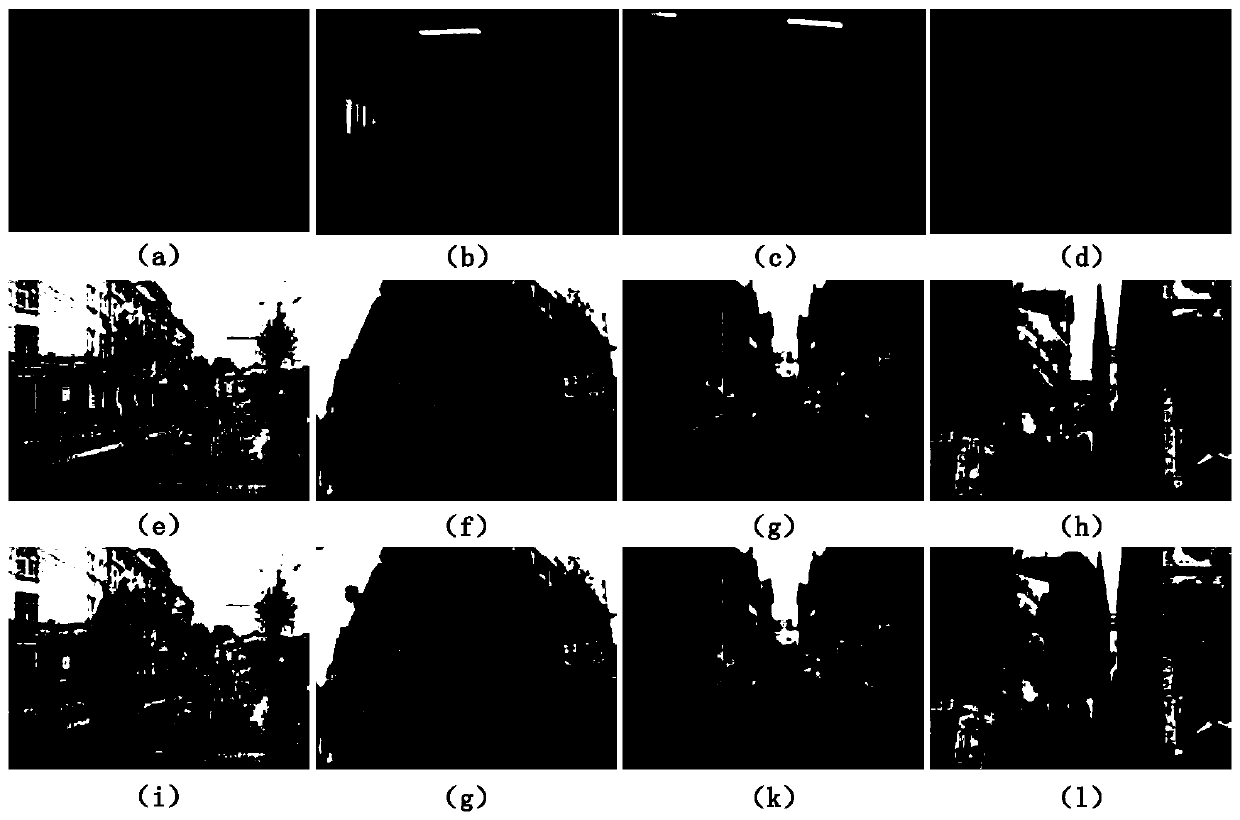
[0049] Prepare a simple scene where the object being followed needs to be relatively easy to distinguish from the background. In a simple scenario, multiple images of the target person at different positions in the robot's field of view are collected from the field of view of the following robot. Download a certain numb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More