

Friction stir welding structure applied to robot and working method thereof
A technology of friction stir welding and robots, which is applied in welding equipment, manufacturing tools, non-electric welding equipment, etc., can solve problems such as welding defect damage to equipment, high requirements for tooling and fixtures, instability and offset, etc., to reduce post-weld processing requirements, Reduce the requirements of fixtures and improve the effect of weld forming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
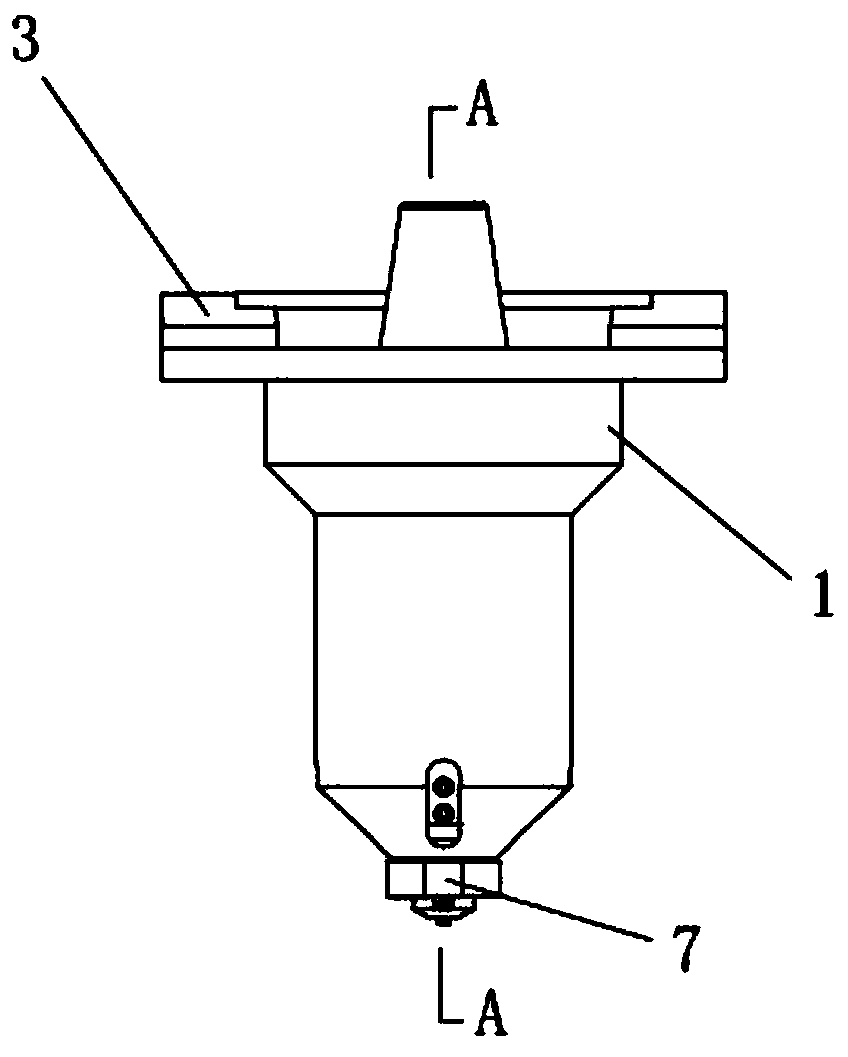
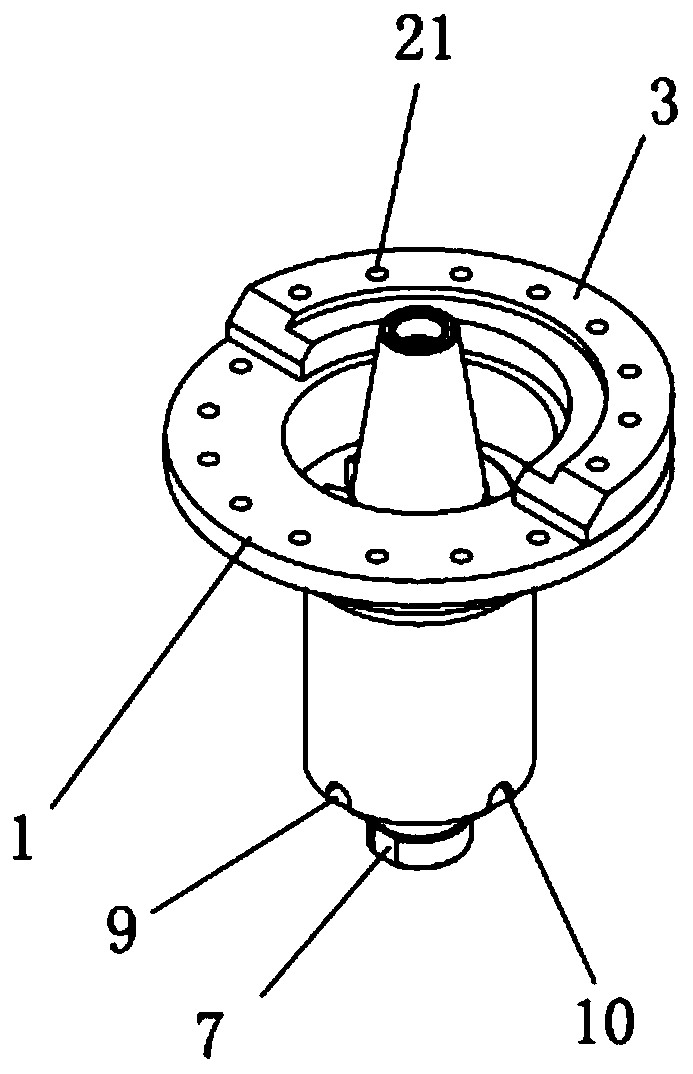
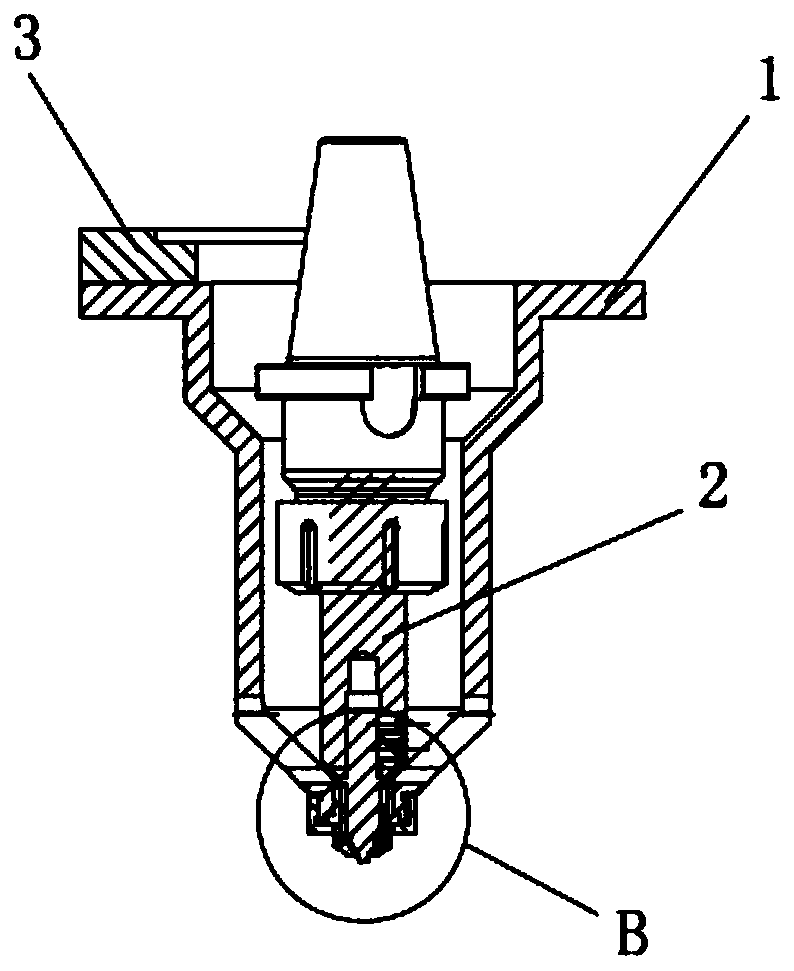
[0042] figure 1 is the front view of the friction stir welding structure applied to the robot in the present invention, figure 2 It is a perspective view of the friction stir welding structure applied to the robot in the present invention, image 3 yes figure 1 A-A sectional view in, Figure 4 yes image 3 Partial enlarged view of B in middle, Figure 5 It is a structural schematic diagram of a stirring needle in the present invention, Figure 6 It is a structural schematic diagram of the shaft shoulder in the present invention. See Figure 1 to Figure 6As shown, a preferred embodiment is shown, and a friction stir welding structure applied to a robot is shown, including: a friction stir welding structure applied to a robot, including a shaft shoulder sleeve 1, a shaft shoulder 4, Main ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More