Wire transmission walking structure based on underactuated decoupling
A wire-driven, under-actuated technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of muscle damage, worker fatigue, and high frequency of motor position feedback, reducing costs, high system reliability, and reducing corresponding requirements. and the effect of system feedback frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with accompanying drawing:
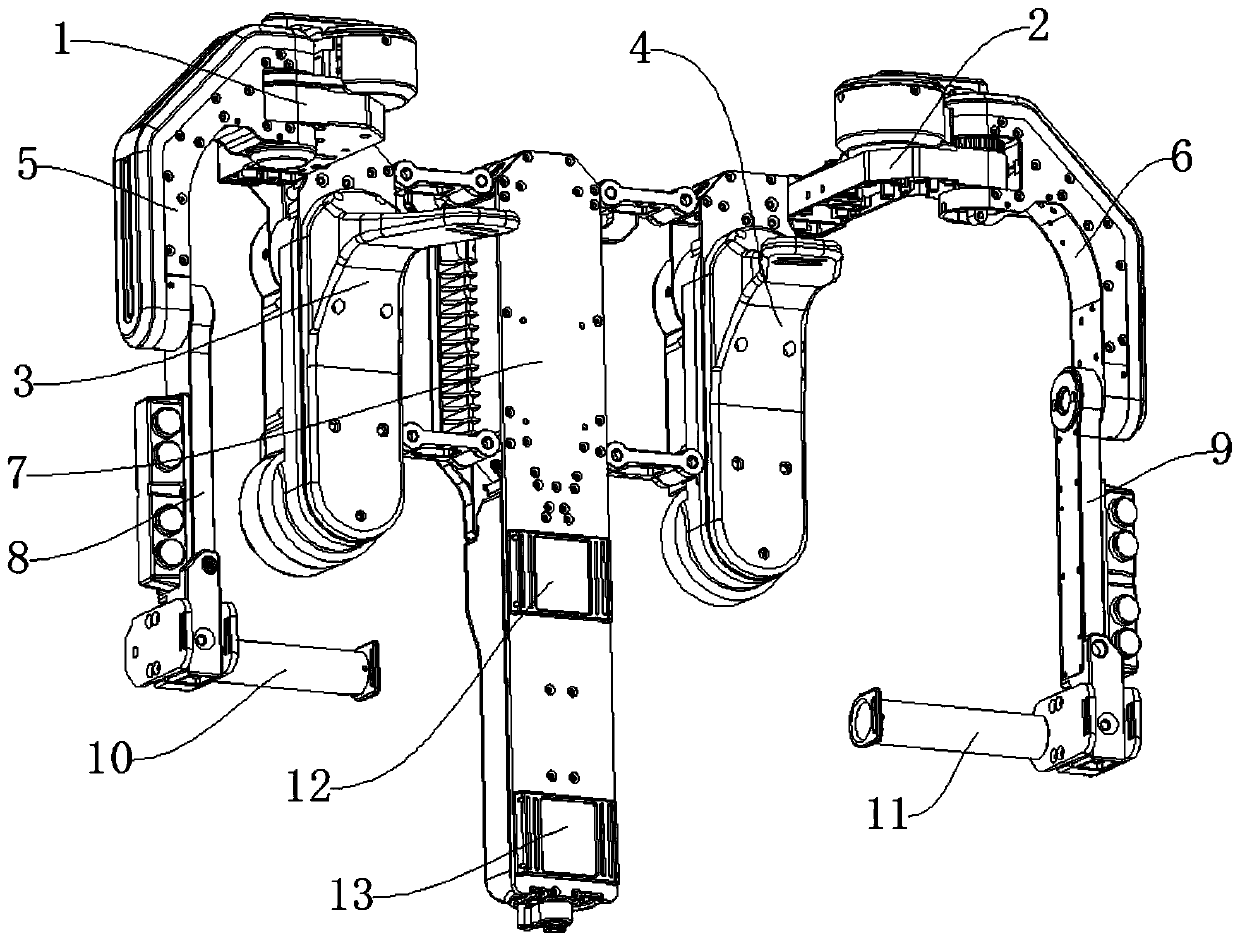
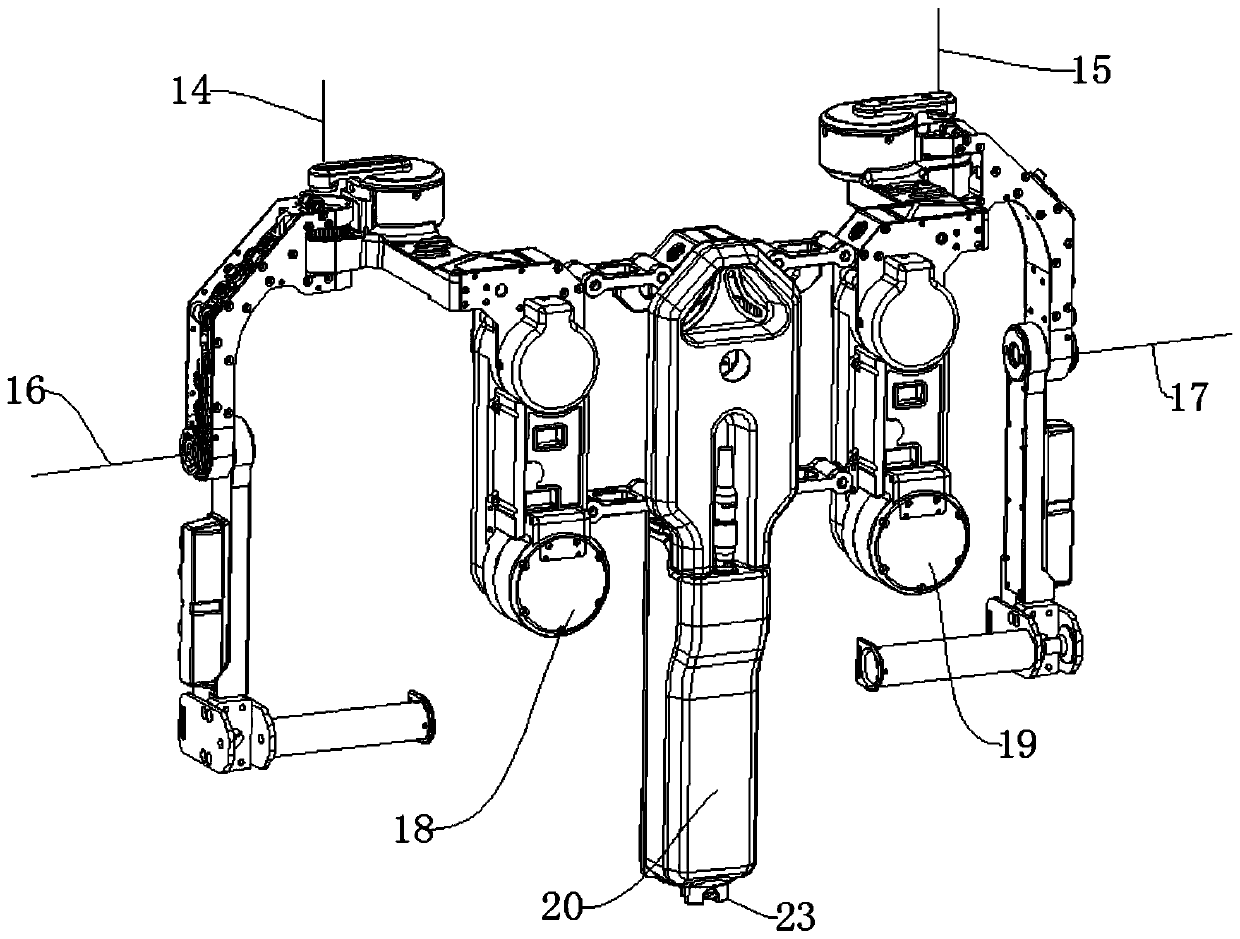
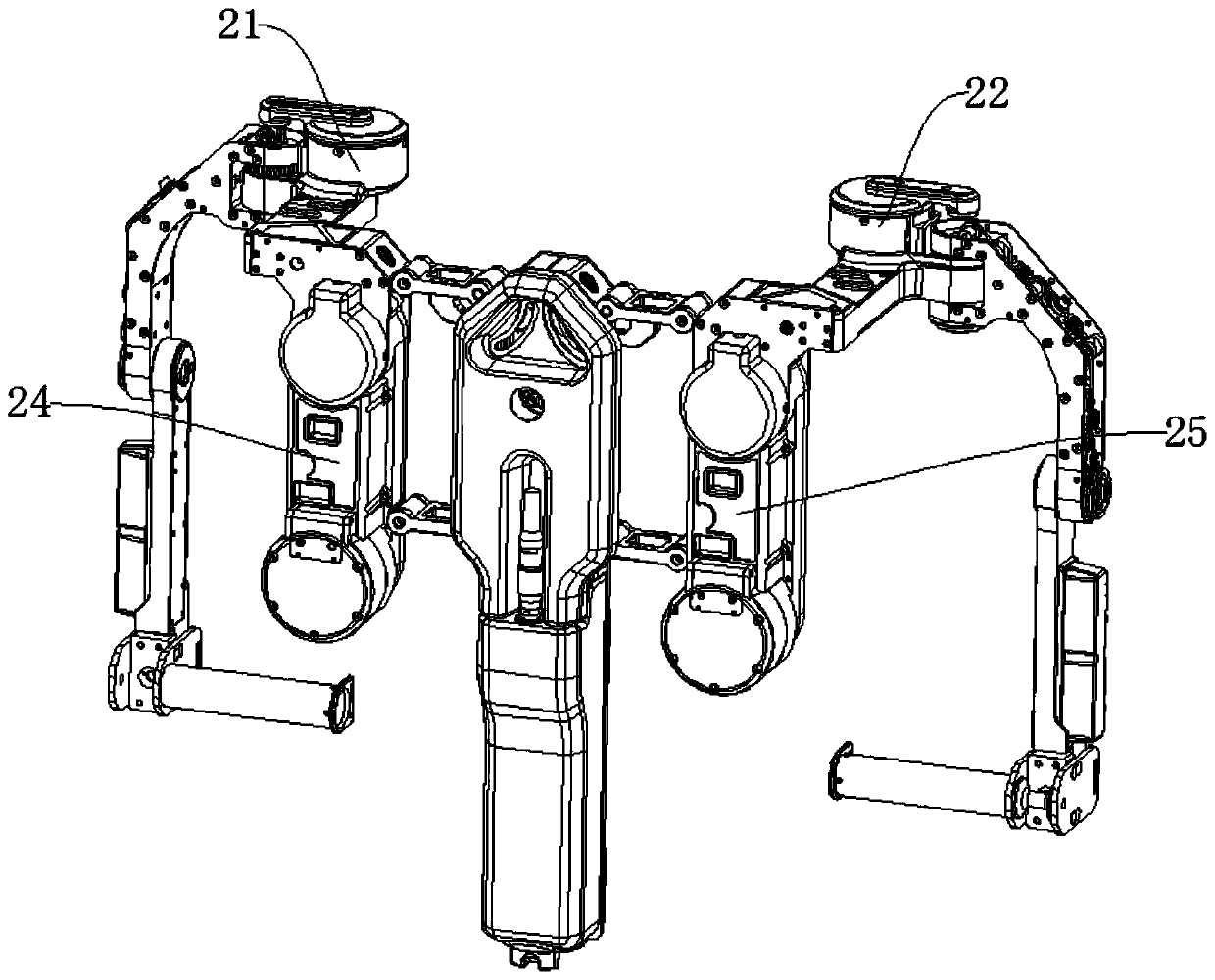
[0036] like Figure 1-Figure 6As shown, a wire transmission walking structure based on underactuated decoupling includes a backrest board 7, a right shoulder backrest 3 and a left shoulder backrest 4, and a right shoulder backrest 3 is provided on one side of the backrest board 7, Backrest board 7 is provided with left shoulder back cushion 4 on one side away from right shoulder back cushion 3, and right side shoulder back cushion 3 upper side is provided with right shoulder wire transmission pulley base 1, and right side shoulder wire transmission pulley base 1 One side is provided with the right shoulder abduction action arm pulley base 5, the right side shoulder abduction action arm pulley base 5 lower end is provided with the lifting action arm 8 on the right shoulder, lifts the action arm 8 lower end on the right shoulder and is provided with Right side elbow bracket ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap