

Robot for real-time positioning and map construction
A technology of map construction and real-time positioning, applied in the field of robotics, can solve problems such as high price, and achieve the effect of improving accuracy, real-time, and strong creativity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
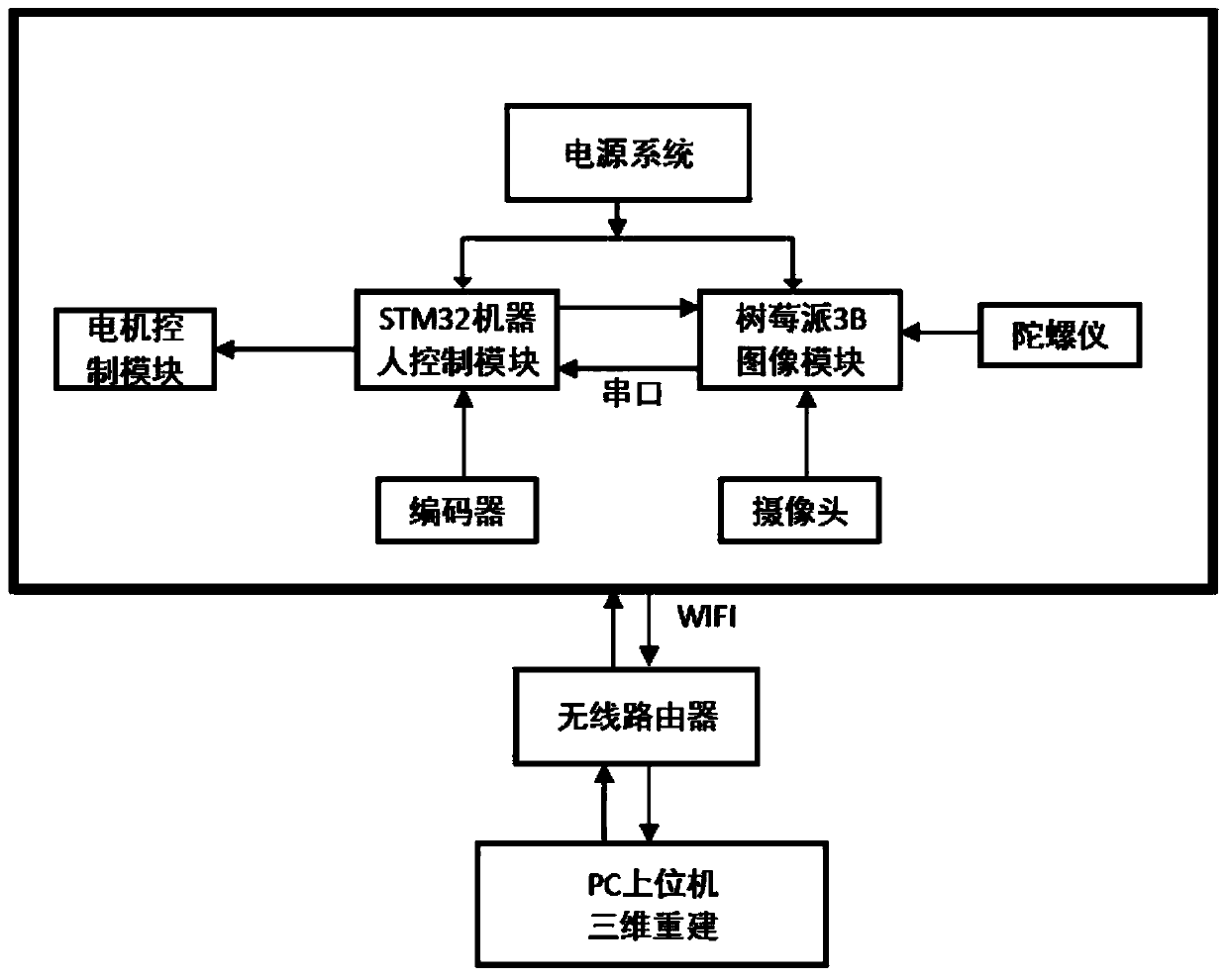
[0023] This embodiment discloses a robot for real-time positioning and map construction, including a power supply system, which is used to supply power to the robot; including an STM32 robot control module and a Raspberry Pi 3B image module, the STM32 robot control module and a raspberry The 3B image modules are connected through a serial port, and the raspberry pie 3B image module is used for image data acquisition through a camera and a gyroscope. The STM32 robot control module is connected with a PC host computer through a wireless router, and the STM32 robot control module is connected with connected to the motor control module.
[0024] Preferably, the STM32 robot control module collects the data of the encoder odometer, and controls the operation on it through the motor control module.
[0025] The Raspberry Pi 3B image module performs preliminary processing on the collected image data, and transmits it to the PC through wireless WIFI for reconstruction of the three-dime...
Embodiment 2
[0034] This embodiment discloses a camera-based visual SLAM, using the current map reconstruction technology and route planning technology, the main content includes the construction of the sweeping robot platform; the collection and transmission of distance odometer and visual data; multi-sensor information fusion method; Car control based on differential controller; map reconstruction technology and route planning.
[0035] The STM32 module is responsible for the data acquisition of the encoder odometer, and at the same time controls the operation on it through the motor. The Raspberry Pi 3B collects the image, and the preliminary processing is transmitted to the PC through wireless WIFI for reconstruction of the 3D image. At the same time, the data of the gyroscope and the image data are processed to adjust the attitude of the robot based on the ROS system. The PC upper computer performs three-dimensional reconstruction processing on the image, and returns the result to th...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Dimensions | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More