Method for simulating soft tissue surgery path planning through implicit surface algorithm
A surgical path and soft tissue technology, applied in the field of computerized surgical simulation, can solve problems such as complicated procedures, long time, and inability to complete fully automatically, and achieve the effect of precise planning, time saving and cost-saving, and difficult surgery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0074] The technical solution of the present invention will be further specifically described below through specific embodiments in conjunction with the accompanying drawings.
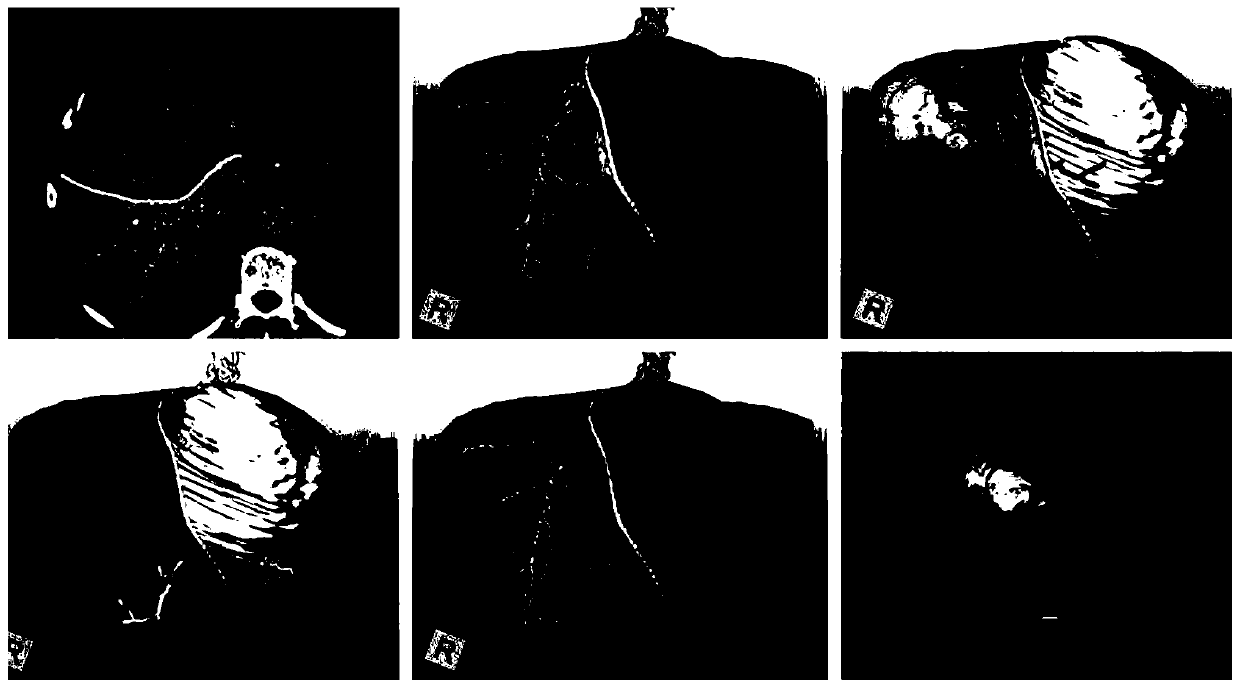
[0075] The present invention provides a method for simulating and simulating soft tissue surgery path planning using an implicit surface algorithm. Here, liver tissue is used as an example of soft tissue. The steps of the method are as follows:
[0076] S1: Obtain the medical imaging data of the liver part of a specific case;
[0077] S2: Establish a three-dimensional geometric model, specifically, use a visualization algorithm to generate a grid model of the liver tissue structure, or use the volume rendering data of medical imaging software as the volume element model;
[0078] Algorithms such as Marching Cubes are often used for 3D model reconstruction of medical imaging data. Many open source tools such as VTK and commercial software that come with clinical imaging equipment have these functions; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More