

Unmanned perception system based on hardware synchronization and working method thereof
A technology of unmanned driving and working method, which is applied in the field of unmanned driving perception system based on hardware synchronization, which can solve the problems that the sensor cannot meet the needs of sensing the surrounding environment, the difference of acquisition cycle and acquisition frequency, the impact of data fusion and algorithm development, etc. , to achieve the effect of rich data types and types, which is conducive to reconstruction and decision-making
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
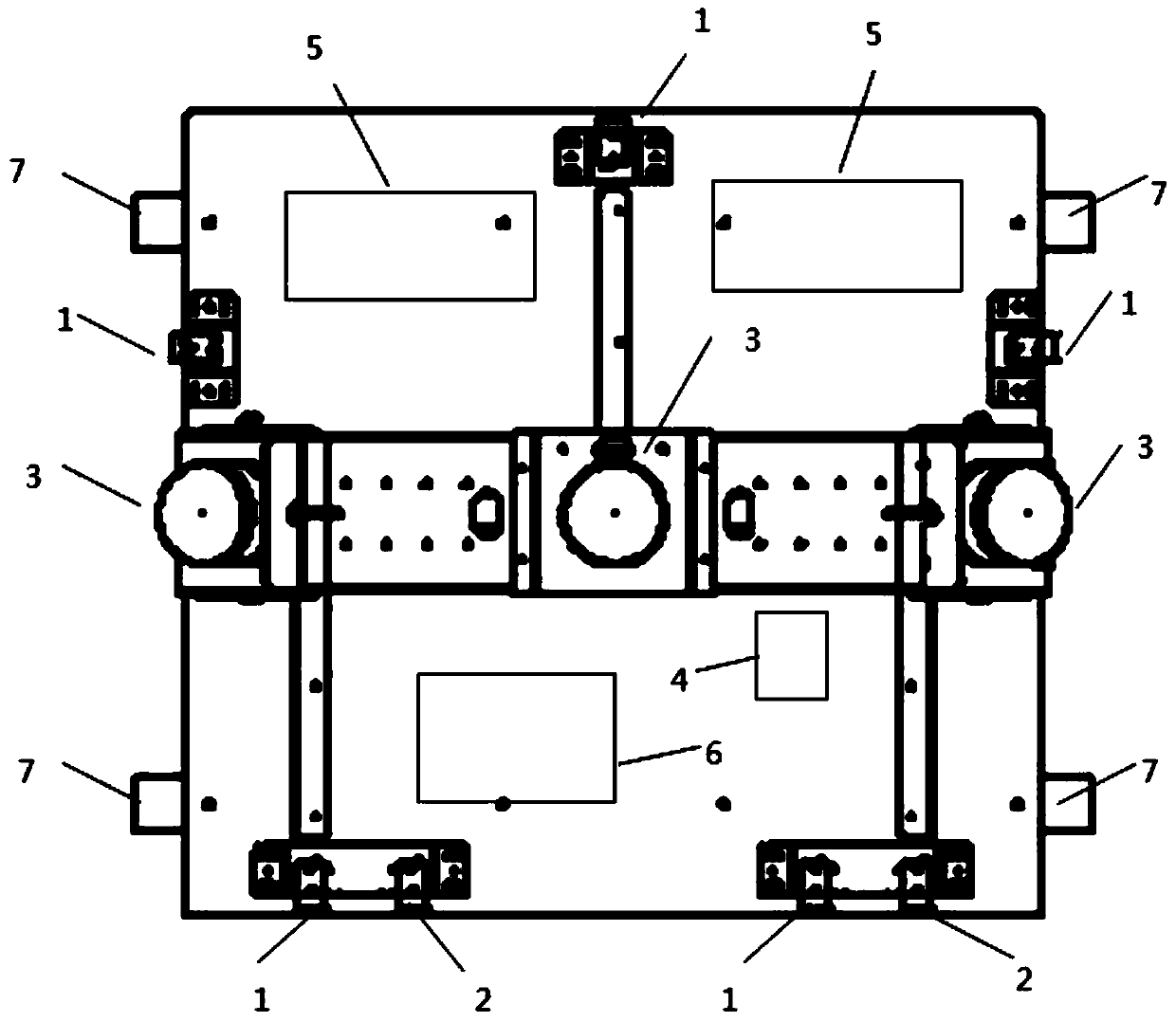
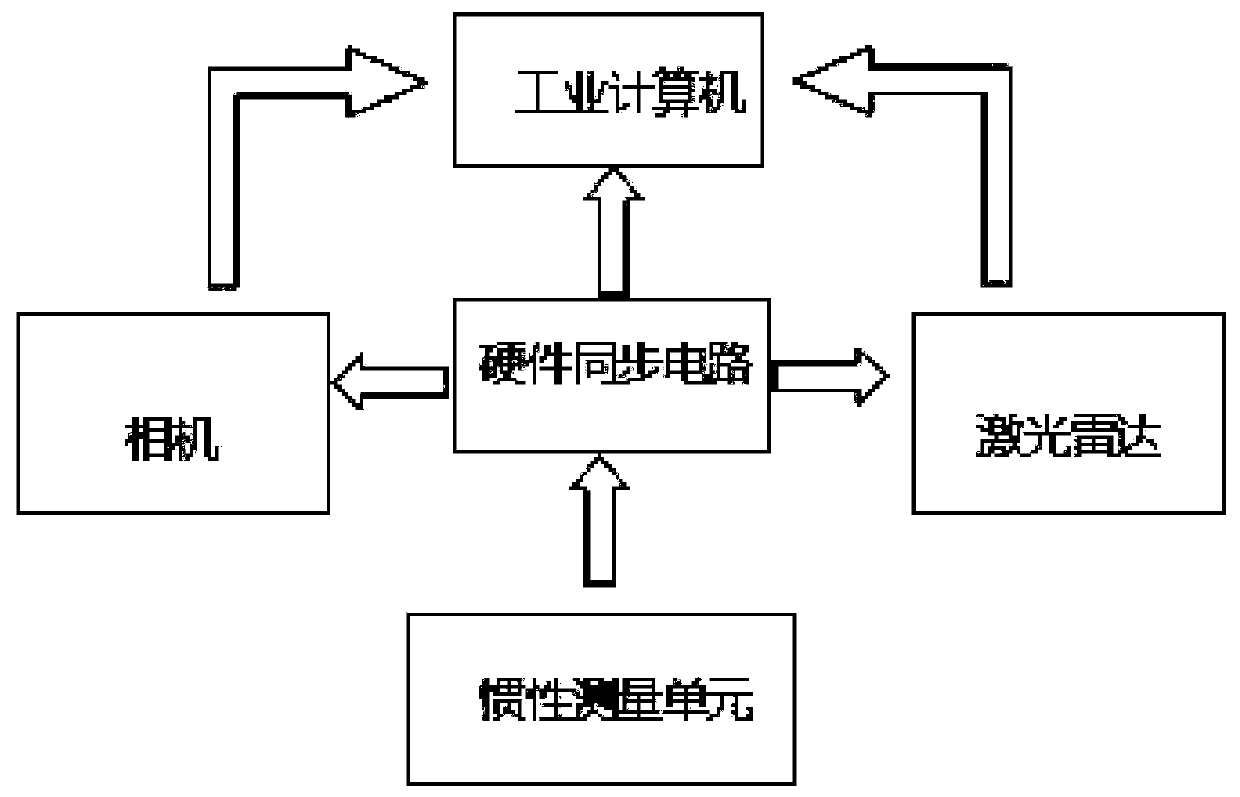
[0030] In order to achieve the above object, the present invention discloses a hardware-based synchronous unmanned driving perception system, including three laser radars 3, two color vision cameras 2, five gray scale vision cameras 1, one inertial measurement unit 4, one The hardware synchronization circuit board 6 includes the industrial computer 5 of the system environment in which the laser radar 3 and the vision software run, the laser radar 3, the color vision camera 2, the grayscale vision camera 1, and the hardware synchronization circuit board 6 are all wired with the industrial computer 5 , the inertial measurement unit 4 is wired with the hardware synchronization circuit board 6, and the above devices are all arranged on the vehicle mount platform, and the inertial measurement unit 4 is used to obtain the current speed, linear acceleration, angular velocity and pose information of the unmanned vehicle.
[0031] The car bracket platform is fixed on the top of the car,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More