

Physical value similar method of spatially 6-freedom-degree self-propulsion control forecast of underwater robot
An underwater robot and physical numerical technology, which is applied in the direction of instruments, height or depth control, vehicle position/route/height control, etc., can solve problems such as calculation failure, complex grid construction, and inability to realize physical numerical simulation of carrier space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
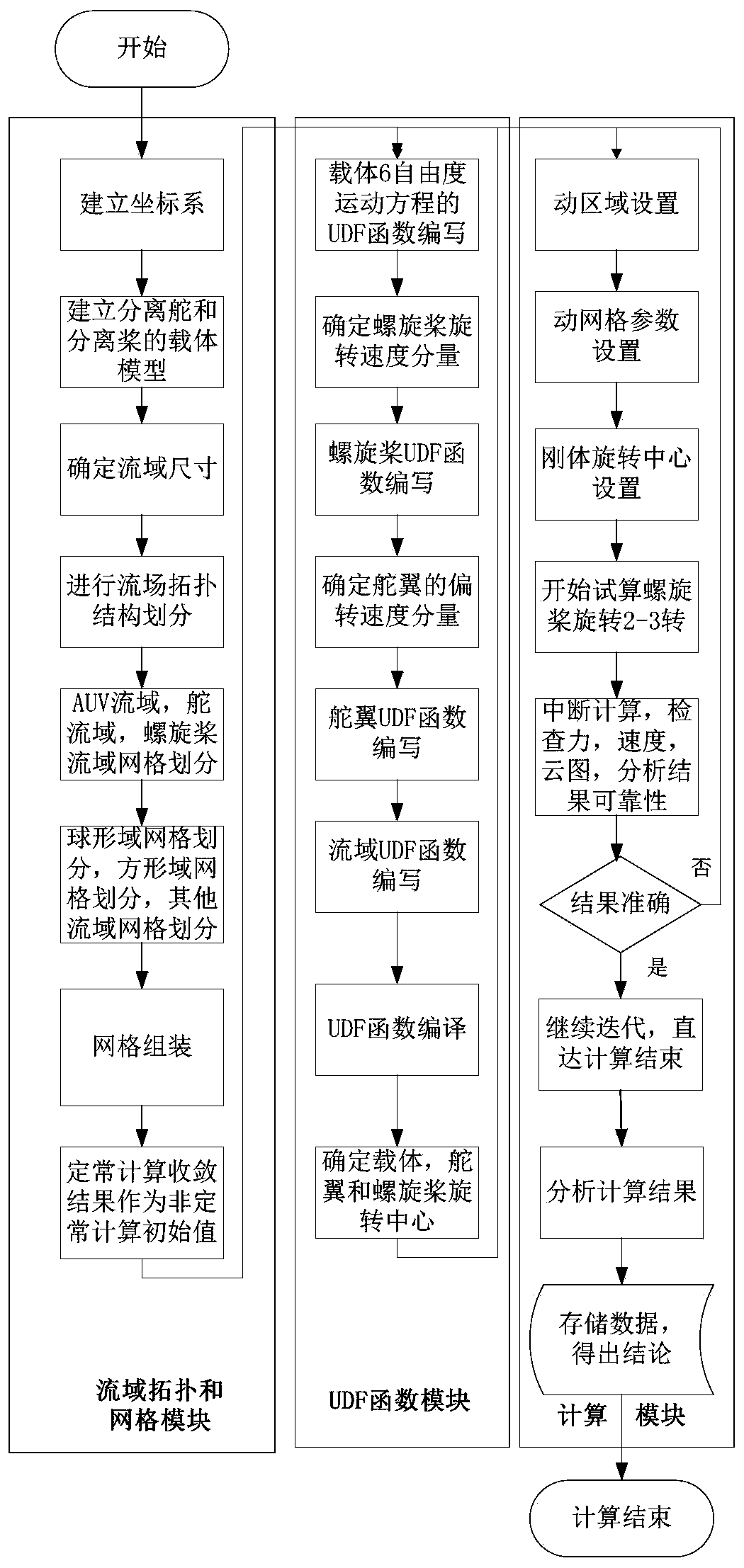
[0074] Such as figure 1 As shown, this embodiment discloses a physical-like numerical method for prediction of 6-DOF self-propelled maneuvering in space of an underwater robot, including the following steps:
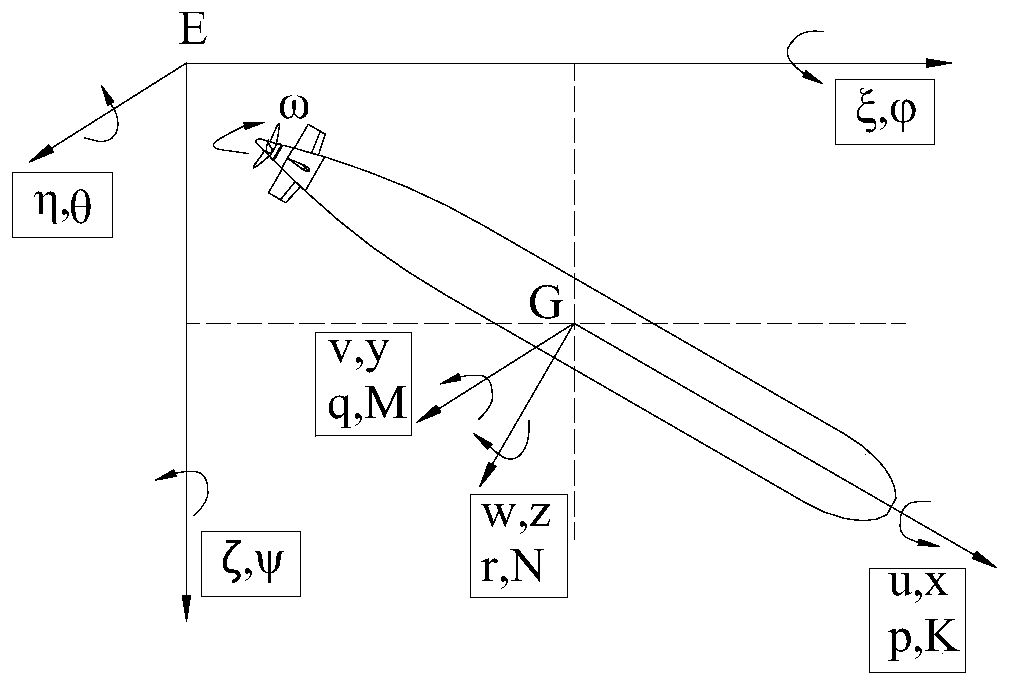
[0075] Step 1: Establish a 6-DOF manipulative motion coordinate system for the underwater robot, which includes parameters such as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More