

A zero point calibration method and clamping device for a five-axis machine tool
A zero-point calibration and machine tool coordinate system technology, applied in the manufacturing field, can solve the problems of mechanical origin drift of CNC machine tools, affecting the economic benefits of enterprises, and poor machining dimensions of parts, so as to ensure the processing process, eliminate quality risks, and increase reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in further detail below in conjunction with accompanying drawing:
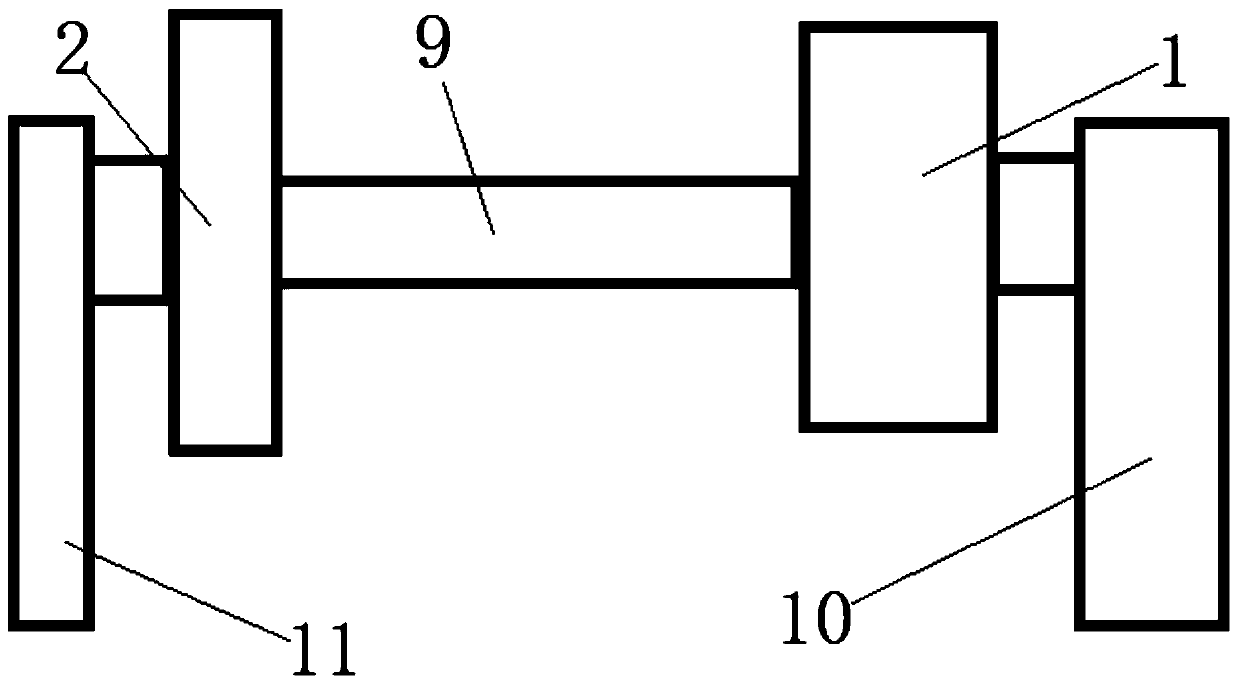
[0037] Such as figure 1 As shown, a zero point calibration method for a five-axis machine tool includes the following steps:
[0038] Step 1), fixing the length direction of the cuboid wool parallel to the A axis of the machine tool on the A axis of the machine tool;
[0039] The thickness of the cuboid wool is not less than 5mm; the cuboid wool is made of cast iron, stainless steel or copper;
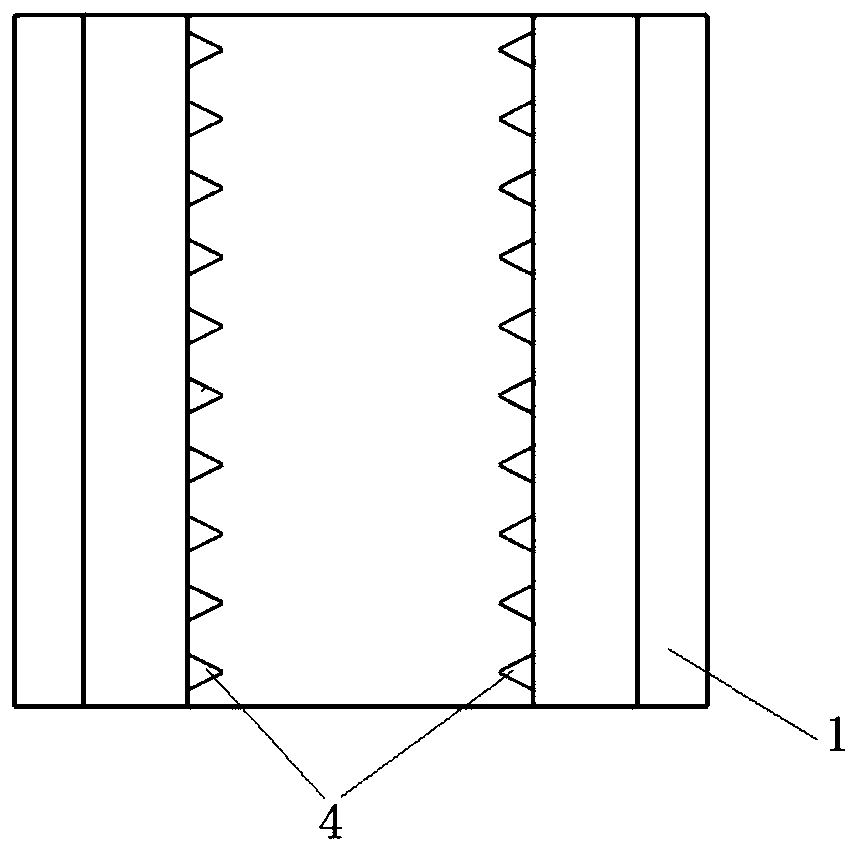
[0040] Step 2), rough milling and fine milling are carried out to two planes in the XOY plane of the cuboid wool under the machine tool coordinate system;
[0041] In step 2), during the milling process of cuboid wool, the milling cutter adopts a flat bottom milling cutter, and the diameter of the milling cutter is not less than 10mm;
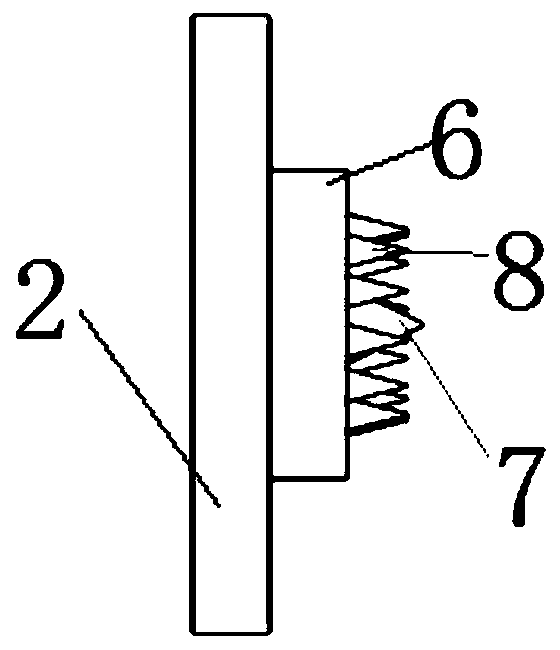
[0042] Such as figure 2 As shown, rough milling is performed on cuboid wool, the rough milling thickness is Δh1, and Δh1 is 1mm-2mm; the two...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More