

A control system for remotely controlling the operation of industrial robots
A technology of industrial robots and control systems, applied in control/adjustment systems, program-controlled manipulators, two-dimensional position/channel control, etc., can solve problems such as inability to remotely control industrial robots, operator personal safety, and physical and mental health hazards. Reach the effect of reducing professional skill level requirements, facilitating operation activities, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
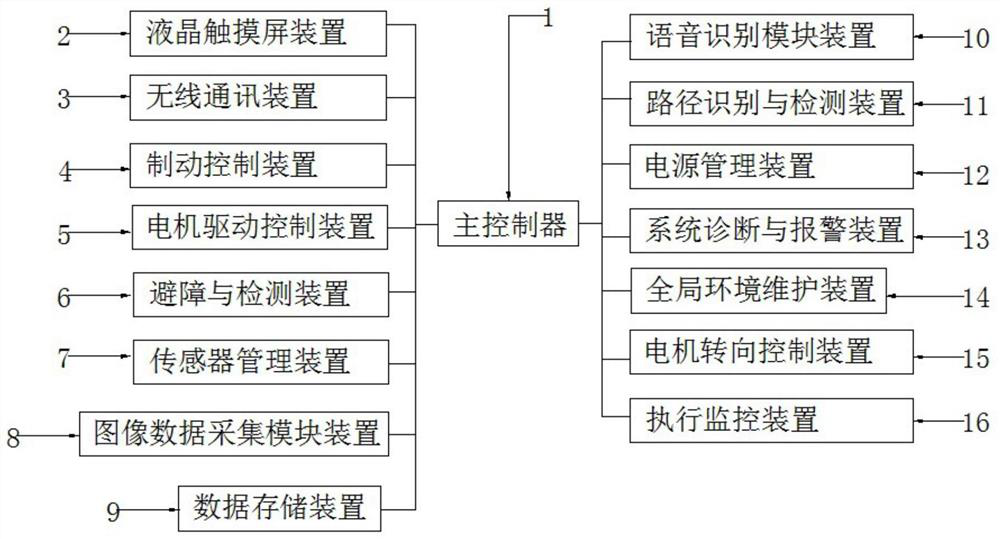
[0026] Embodiment one, such as figure 1 As shown, a control system for remotely controlling the operation of an industrial robot according to an embodiment of the present invention includes a main controller 1, a liquid crystal touch screen device 2, a wireless communication device 3, a brake control device 4, a motor drive control device 5, an obstacle avoidance and detection device 6, sensor management device 7, image data acquisition module device 8, data storage device 9, voice recognition module device 10, path recognition and detection device 11, power management device 12, system diagnosis and alarm device 13, global environment maintenance device 14, motor steering control device 15 and execution monitoring device 16, wherein the output terminals of the main controller 1 are respectively connected to the liquid crystal touch screen device 2, the wireless communication device 3, the braking control device 4, The motor drive control device 5, the obstacle avoidance and d...
Embodiment 2
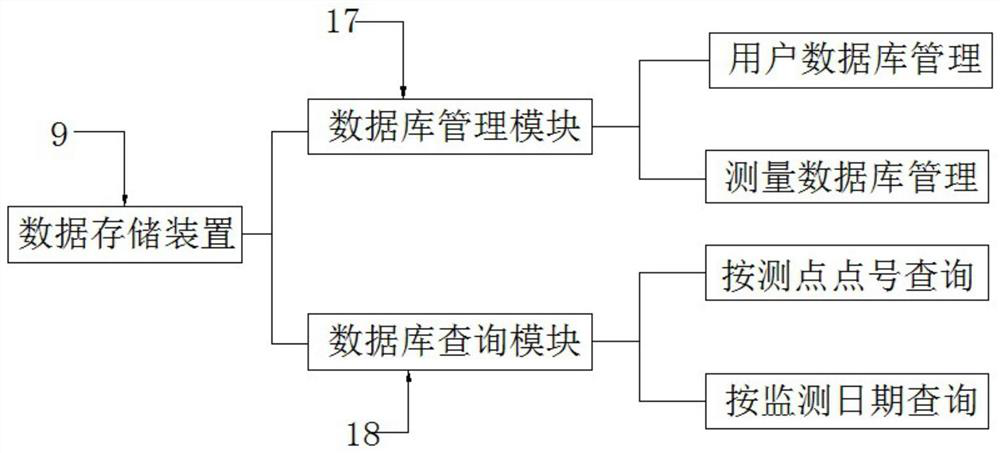
[0027] Embodiment two, such as image 3 As shown, the data storage device 9 includes a database management module 17 and a database query module 18, the database management module 17 includes a user database management module and a measurement database management module, and the database query module 18 includes a query module by measuring point number and query modules by monitoring date.
Embodiment 3
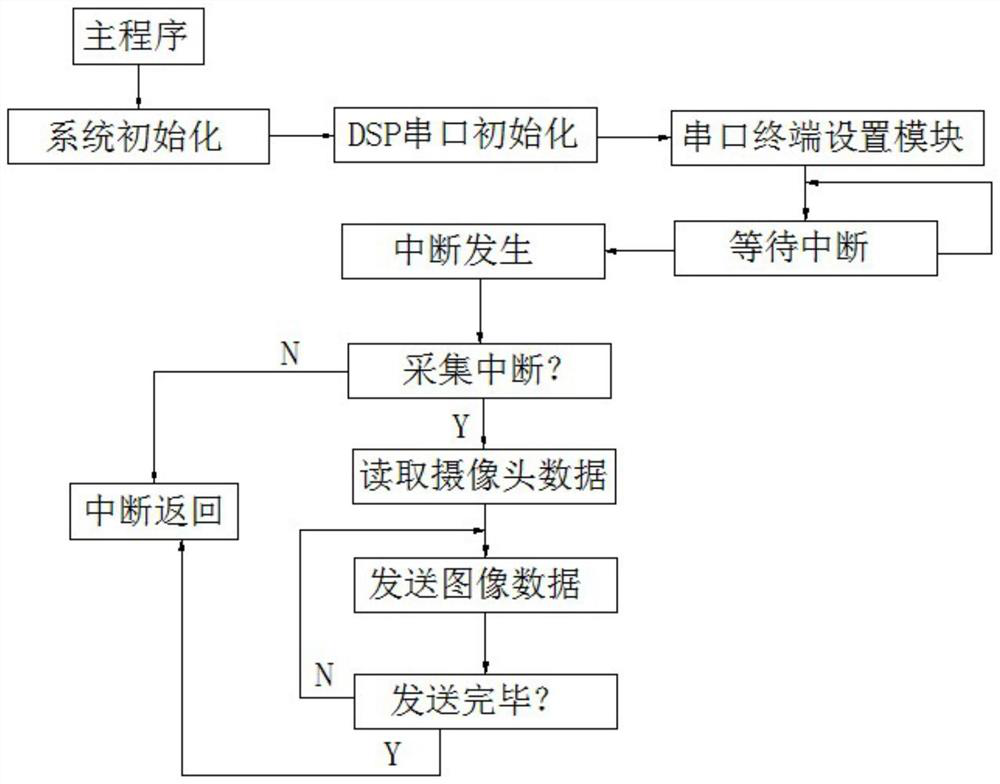
[0028] Embodiment three, such as Figure 4 As shown, the specific steps of the method for collecting information by the robot include the following:
[0029] S101: Initialize the system;
[0030] S102: Collect information to obtain an information collection module;
[0031] S103: Perform information preprocessing through the collected information;
[0032] S104: Send the preprocessed information to the background;
[0033] S105: The information received by the background will execute the instruction if the instruction is received within the specified time range, and return to the information collection module to re-collect information if the instruction is not received within the specified time range.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More