

Vehicle-mounted positioning navigation method based on self-adaptive odometer model
A positioning navigation and odometer technology, which is applied to road network navigators, satellite radio beacon positioning systems, instruments, etc., can solve the problems of difficulty in ensuring the stability of positioning and navigation functions, the loss of positioning continuity, and the need to improve positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with accompanying drawing and embodiment:
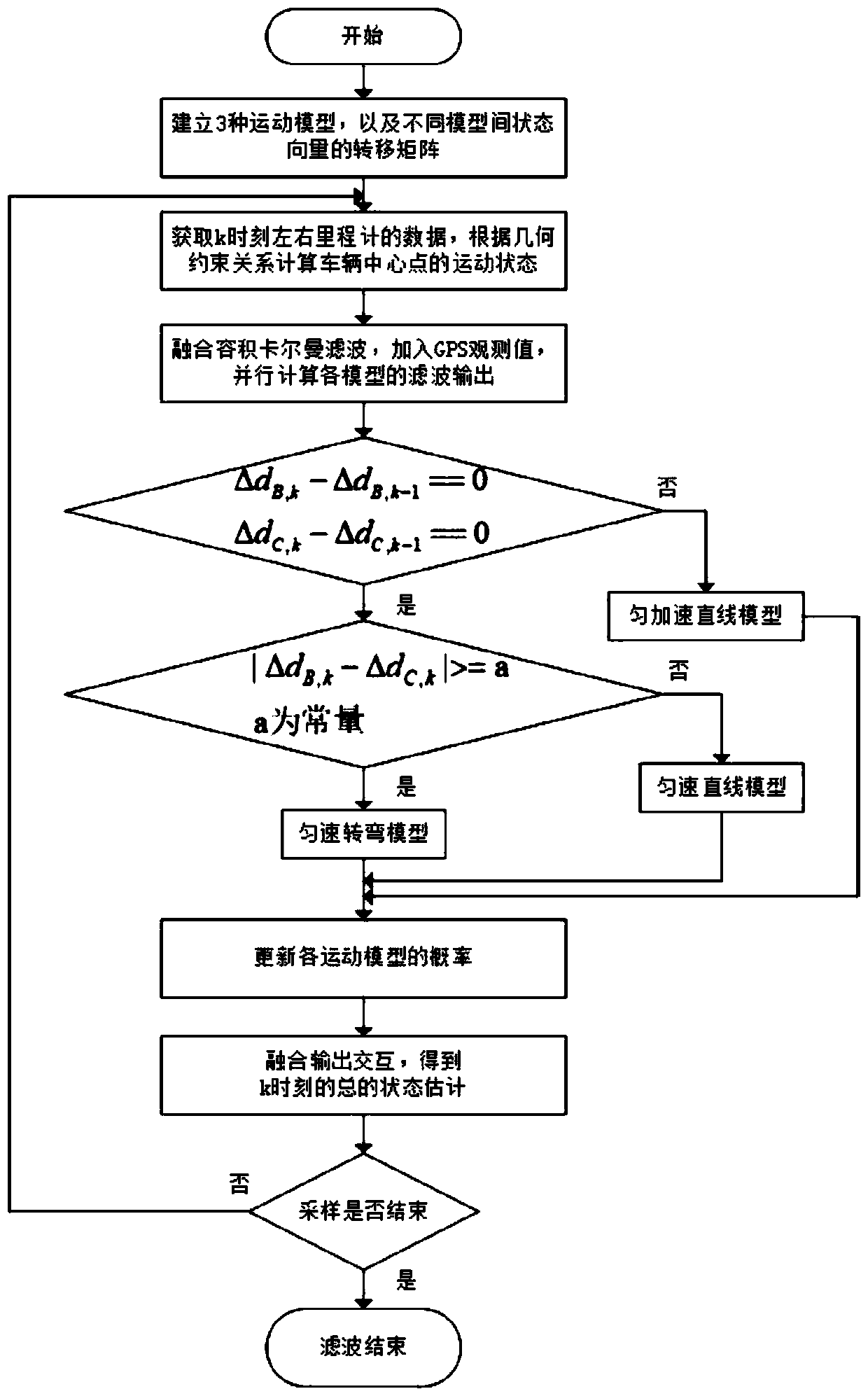
[0056] The invention provides a vehicle positioning and navigation method based on an adaptive odometer model, such as figure 1 As shown, the method includes:
[0057] (1) According to the possible m motion states of the vehicle, m nonlinear motion models and the transfer matrix T between m model state vectors are established correspondingly i,j ;
[0058] The nonlinear motion model is expressed as
[0059]
[0060] Among them, i, j=1, 2, ... m, j represent the corresponding nonlinear motion model, T i,j That is, the transfer matrix from model i to model j, k is the sampling time during the driving process of the vehicle, is the state vector at time k, is the output data of the odometer at time k, is a white noise sequence with zero mean;
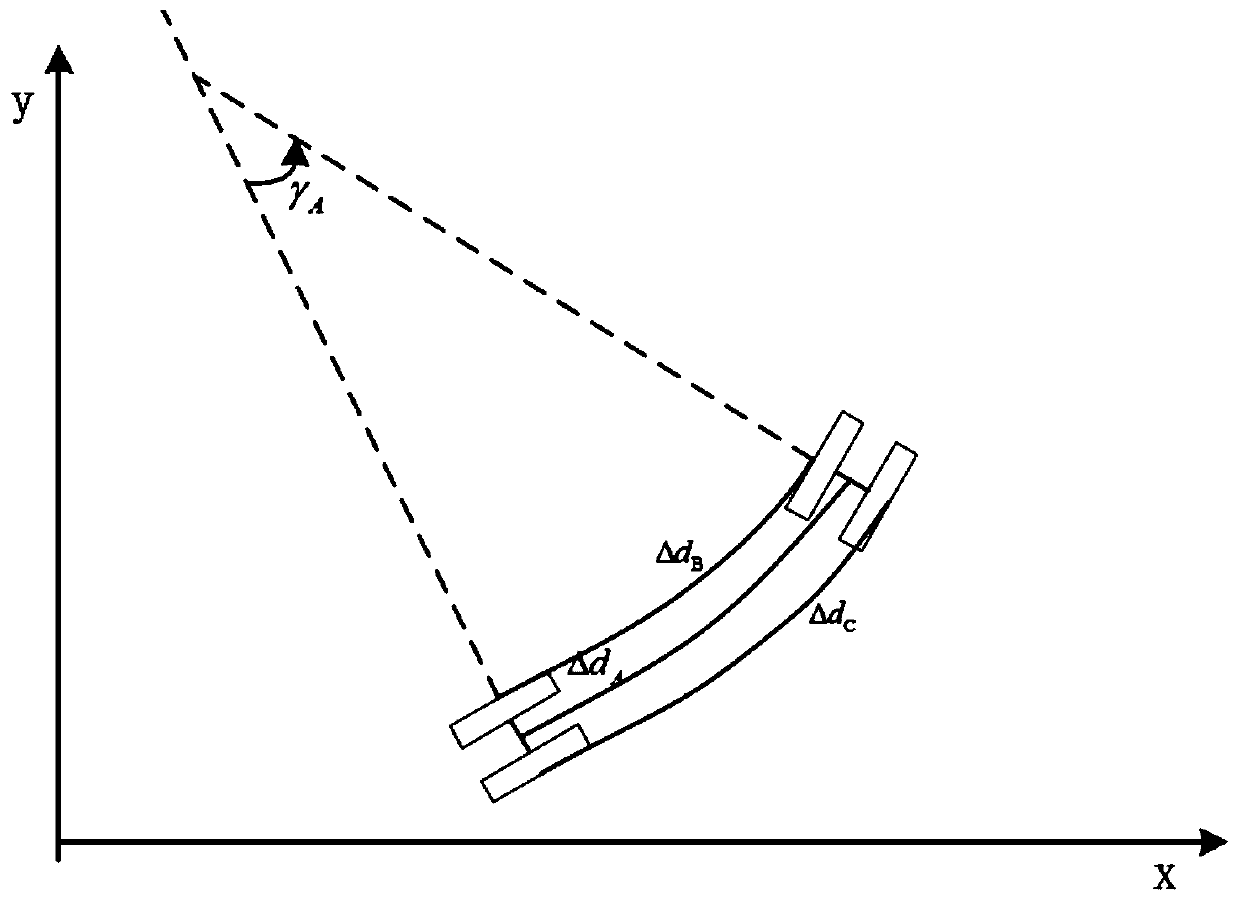
[0061] (2) Collect the odometer data of the left and right driving wheels of the vehicle at time k, and ana...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More