

Robot joint torque signal acquisition system and method
A signal acquisition system and robot joint technology, applied in instruments, manipulators, torque measurement, etc., can solve the problems of reduced torque measurement signal accuracy, low sensitivity, and large delay in torque perception, so as to improve accuracy and speed, and improve Accuracy and rapidity, the effect of improving filtering efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to understand the technical content of the present invention more clearly, the following examples are given in detail.
[0054] In one embodiment, the robot joint torque signal acquisition system of the present invention includes:
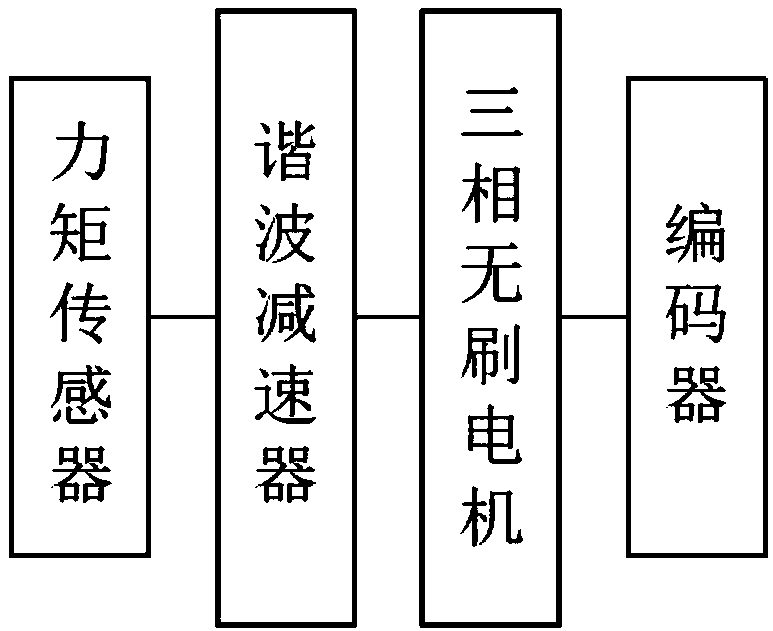
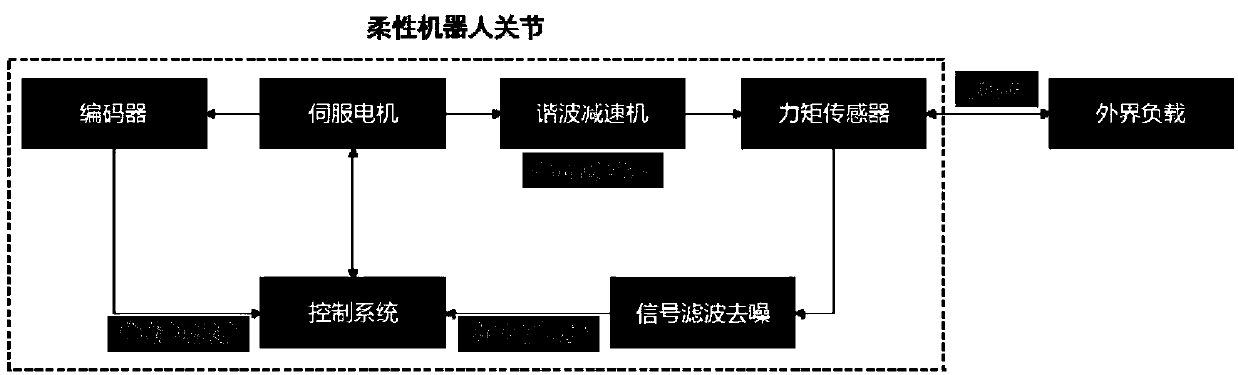
[0055] The torque sensor is arranged at the output end of the robot joint to measure the output torque of the joint and generate a torque sensor measurement signal;
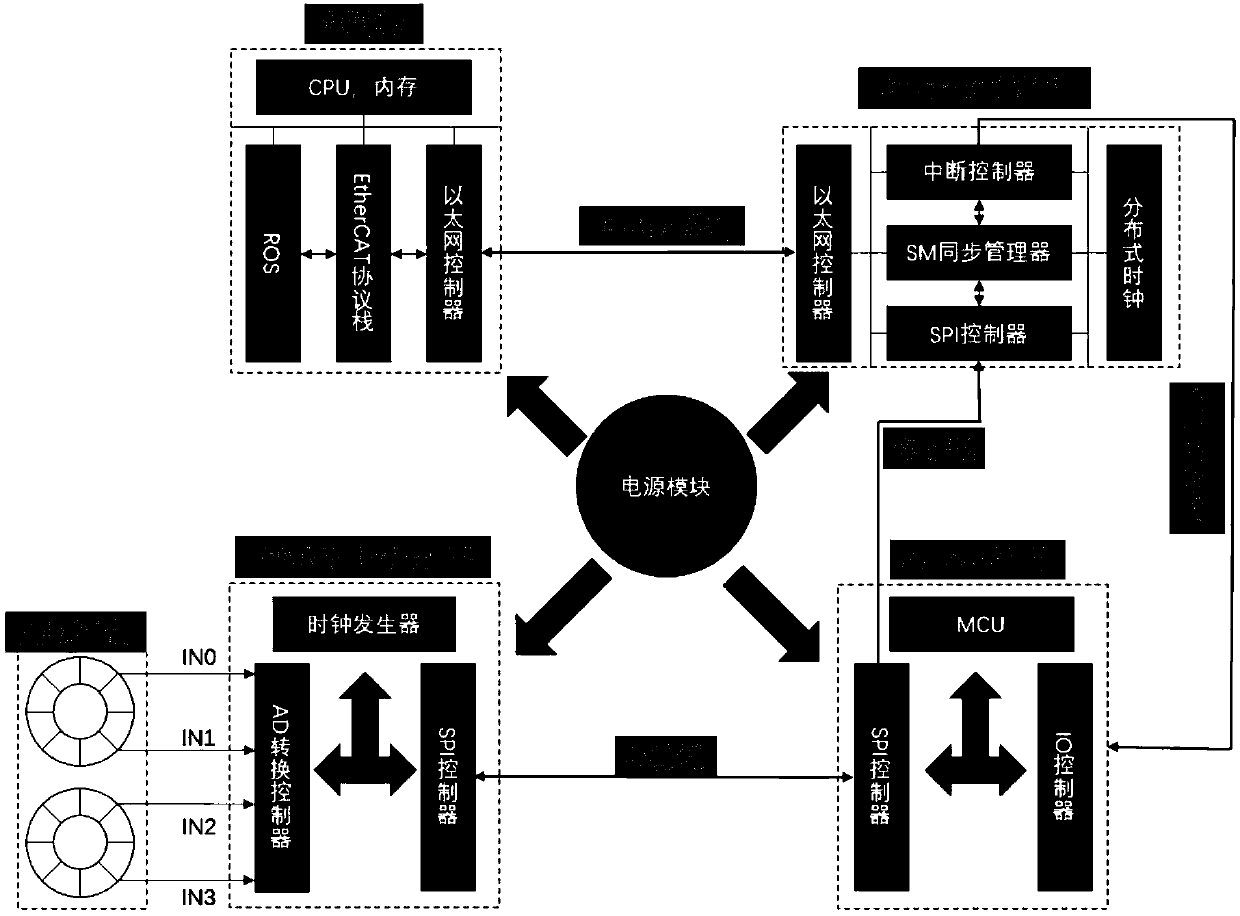
[0056] The lower computer controller is connected to the torque sensor, and is used to obtain the measurement signal of the torque sensor;
[0057] The communication board includes an interrupt controller, connected to the lower computer controller, to control the lower computer controller to execute the signal acquisition interrupt function to obtain the torque sensor measurement signal, and from the lower computer The controller obtains the measurement signal of the torque sensor;
[0058] The host computer generates a torque output value according to the torque me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More