

Visual guiding-based robot workpiece grabbing method
A visual guidance and robot technology, applied in the field of robot visual recognition and positioning, can solve the problems of increasing calculation, reducing efficiency, missing capture, etc., and achieve the effect of reducing data volume, low error rate, and eliminating interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0056] Below in conjunction with accompanying drawing, the present invention is described in further detail:
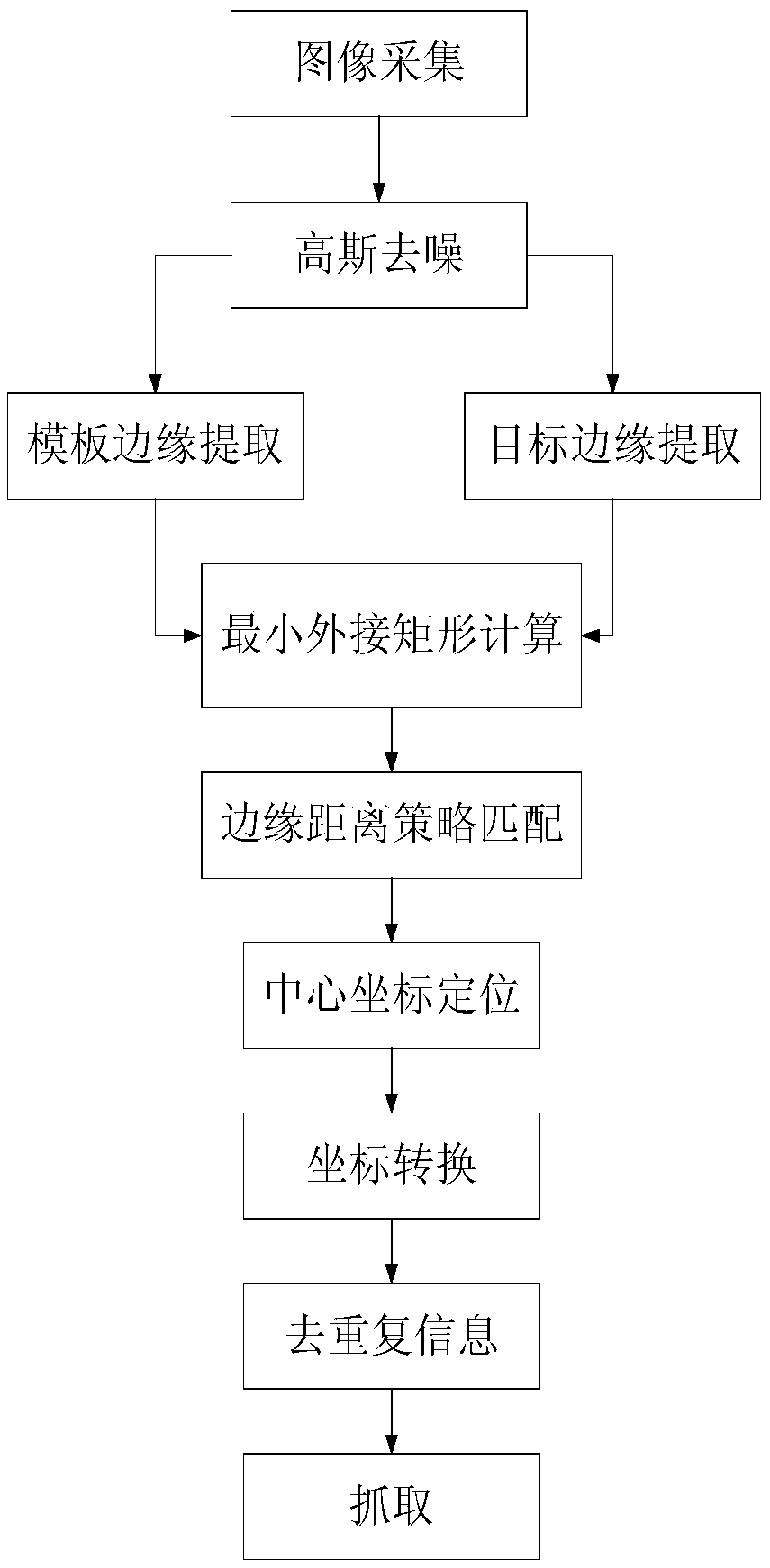
[0057] The illumination change and rotation of the workpiece itself will change its gray level distribution in the global image. The present invention first uses the edge extraction operator to obtain the continuous edge features of the target workpiece. In order to eliminate the interference of noise and illumination changes, the edge feature image is extracted , propose a search strategy based on edge point distance (such as Figure 5 shown). According to the rotation change, the minimum circumscribed rectangle of the workpiece is established, the possible deflection angle of the target is obtained, a template set is generated, and the target recognition is completed through a search strategy. Establish the conversion relationship between the vision system and the robot system, remove repetitive information, and complete the positioning and grasping of the target w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More